












波士顿的机器狗前段时间已经开售了,但是价格有点不美丽。网上开源的机器狗数不胜数,该选哪个?近日,一款名为Bittle的机器狗登上了kickstarter的众筹榜,神似波士顿Spot,3000行代码就实现了所有算法。
波士顿动力狗很好玩,但是动辄几十万的售价着实有点消受不起。
为了解开大家的「波士顿」情结,一个名为Petoi Bittle的迷你版波士顿动力狗应运而生,它只有 手掌般大小,还是组装式的,你甚至可以放进口袋里。

翻身越障,还支持添加TensorFlow的AI模型
看起来是不是很cute?它绝非看上去这么简单,大波士顿狗能做的事,它基本也能做到,还有很多模式可选,比如有时会调皮的像一只宠物狗。
先来看看它有什么技能吧!
平稳桌面加速跑。
越障翻身,手到擒来。

加个Arduido或者树莓派,用TensorFlow赋能,瞬间化身智能狗,轻松实现目标跟踪。

踩不死的小「波士顿」,全身3D打印Arduido驱动
可以看到,Bittle 用四条腿而不是轮子移动,步行给了它更多的自由度,可以行走在各种非结构化的地中。这种动态可操作性一般只见于波士顿Spot这样的豪华机器人,但是Bittle的创造者们想出了一个草根解决方案来简化这个系统。

Bittle 由四个主要部件组成: 身体框架、执行器、电子设备、电池,然后软件来协调所有的硬件执行各种任务,整个系统简洁高效。

现在我们先把它拆开。
上面的所有部件都是3 d 打印出来的,因为使用了高强度注塑成型塑料,所以它可以很好地抵抗外界压力。
在压力测试中,组装好的机器人可以承受一个成年人的踩踏而不会受损!
当然,防冲撞不仅仅依靠高强度的身体,Bittle的柔韧性也很好,四肢的弹簧可以起到一定的缓冲作用,如果遭受的压力过大,它会非常聪明地按指定的「薄弱环节」分解,然后很容易二次安装或更换。

Bittle的执行机构是伺服电机,它使用九个 P1S 伺服系统来驱动 。其中八个是用来走路的关节,一个用来摇头。

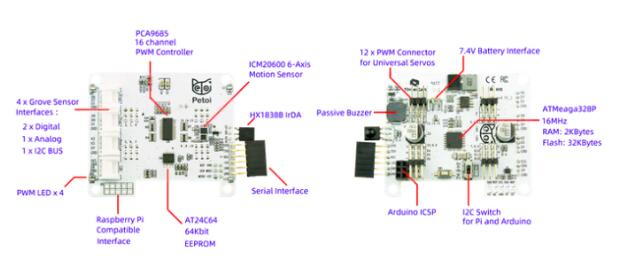
Bittle的一切活动由「大脑」NyBoard v 1驱动,这是一个定制的 Arduino 板子,带有丰富的传感器。该板可以驱动至少12个 PWM 伺服系统,并且有一个 IMU (惯性导航系统)用于平衡整个身体。
此外,你还可以通过一个红外遥控器来触发基本动作,比如「行走」、「坐下」,或其他更详细的指令。
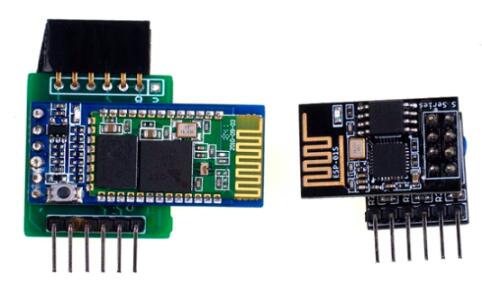
Bittle还自带了一个蓝牙模块,可用于无线上传下载代码,并通过个人电脑或智能手机应用程序控制它。除了蓝牙,还有一个支持无线通信的 WiFi 模块,当用Bittle学习平衡相关的运动规划时,就不用连一堆线了。
你甚至可以利用远程「大脑」的计算能力,而不必拘泥于 Bittle 本身的负载限制。
目前Bittle项目在kickstarter上发起了众筹,已经筹集到了足够的资金,相信不久我们就能看到成熟的产品了。

不光身体小,数据结构和算法实现也很精炼
如果等不急的话,可以试着自己做一个,Bittle的代码也已经在GitHub开源,奇怪,为什么不是OpenDog呢?
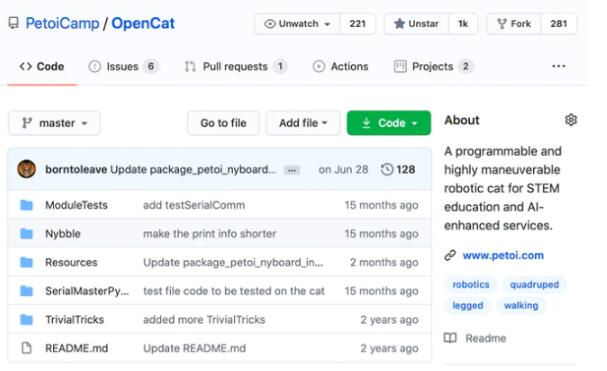
整个Bittle由 OpenCat 的代码驱动,除去第三方库的话,大概只有3000行代码。
如果看代码,你会发现它定义了执行四足运动的最小数据结构和算法。同样也提供了Python接口,可以方便地从其他设备给Bittle发送指令。
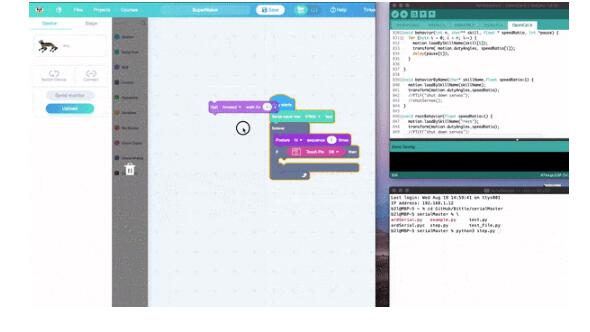
你可以在不同的编码环境中对 Bittle 进行不同级别的编程,比如在 Arduino IDE 中使用 C,在终端中使用 Python。都不熟悉?没关系,还有拖拽式编程可用。
Bittle涵盖了3D打印、机械工程、电子工程和编程的方方面,如果能够从零到一做出一个Bittle,对个人的思维和动手能力都将有很大的提升,可以作为STEM教育的辅助工具。
一起来组装一个吧!




















