微型机器人可以在极为狭小的空间里运动,这是人类和传统机器人无法做到的。但由于其体型过小,功率、控制力受限,目前的技术仍无法使其有效解决社会问题。
近日,来自南加州大学的研究人员发明了一款酒精驱动的微型昆虫机器人,在解决微型机器人能量来源问题上提供了全新思路,朝着研发完全自主微型机器人的目标迈进了重要的一步。
该微型机器人的名称为RoBeetle,不同于其他依靠电池或外接电线驱动的微型机器人,它的能量来源是甲醇。它长15毫米,质量只有88毫克(大约相当于三粒大米),却可以拖运其自身重量2.6倍的物体。它能够携带95毫克的燃料,燃料最多可以为其供电2个小时。
相关研究《An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle》8月19日发表在《科学机器人》上,主要作者为南加州大学航空航天与机械工程系助理教授Néstor O. Pérez-Arancibia和博士生Xiufeng Yang、Longlong Chang。
“电池的能量密度非常低,因此我们需要新的能量来源。我们制作的机器人又轻又小是因为它不依靠电池供能。”Néstor O. Pérez-Arancibia在接受New Scientist网站采访时表示。
研究人员在论文中称,大多数昆虫的肌肉发达,这有利于它们进行激烈的运动。同时,它们粗壮的身体有助于以脂肪和糖原的形式储存能量。受此启发,研究人员开发了可靠坚固的微型人工肌肉,可以像真实肌肉一样收缩和放松。
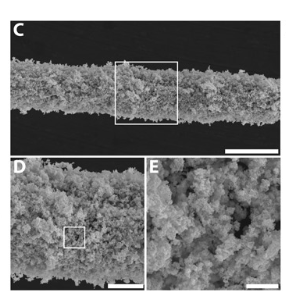
覆盖有铂(Pt)粉的镍钛合金线的电子显微镜图像
最值得关注的是,人工肌肉的能量来源是甲醇。以往微型机器人通常依靠电池或外接电线驱动,前者因为体积限制,其比能量往往很低(低于1.8MJ/kg),而后者则制约机器人的独立性。甲醇在正常大气压下以液体形式储存,能量是小型电池的10倍以上。这意味着利用甲醇驱动的微型机器人自主性更强,同时可以保持较小的体积。
该动力系统中的镍钛合金线表面覆盖有铂(Pt)粉,可以催化甲醇燃烧。燃烧产生热量,使位于机器人腿部的电线缩短。化学反应停止后,电线冷却,重新延伸,由此驱动RoBeetle运动。
为了验证在甲醇驱动下机器人的运动性能,研究人员进行了两组实验。
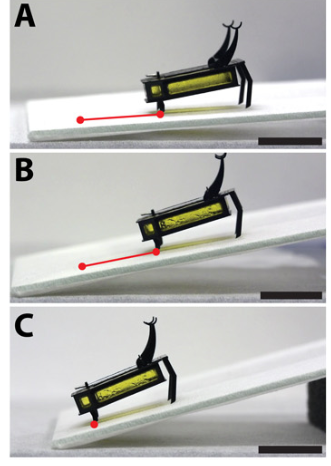
该机器人能轻松爬上倾斜角为5°和10°的斜坡,但在倾斜角度升至15°时失败了
在爬坡实验中,研究人员在倾斜的载玻片上放上了一张表面光滑的纸巾,然后调整斜面倾斜角度测试RoBeetle的爬坡能力。该机器人能轻松爬上倾斜角为5°和10°的斜坡,但在倾斜角度升至15°时失败了。此外,因为液态甲醇具有粘性,倾斜角度对其在储存箱里的分布可以忽略不计。
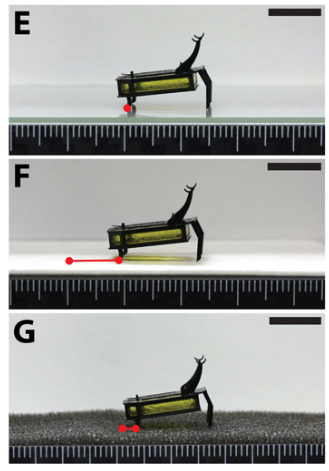
RoBeetle在粗糙程度不同表面上的爬行能力
在第二组实验中,研究人员测试了RoBeetle在粗糙程度不同表面上的爬行能力。结果显示,机器人可以在纸巾、泡沫表面爬行,但无法在光滑的玻璃表面爬行。同时,研究人员进一步探究了RoBeetle的载物运输能力,发现它可以拖运其自身重量2.6倍的物体。
研究人员在论文中表示,RoBeetle的动力设计可作为范例,用于研发能够在水陆空运动的自主微型机器人。
Pérez-Arancibia表示,他们研制出的甲醇驱动人工肌肉作为该领域的重大突破,将使他们研发出第一个完全自动的微型飞行机器人。他们的下一步计划是研究在RoBeetle工作时如何为其添加燃料,从而使机器人可以长时间持续工作。
此外,研究人员计划对RoBeetle进行编程,使操作者能与它进行交互。如果成功了,RoBeetle将可以充当人工授粉器,或者协助医生进行复杂的手术。
不过,在同期的评论文章中,美国麻省理工学院计算机科学与人工智能实验室博士后研究员Ryan L. Truby和哈佛大学工程与应用科学学院博士后研究员李曙光认为:“虽然RoBeetle是一个令人兴奋的微机器人里程碑,但仍有改进空间。”
评论指出,RoBeetle 的运动速度只有0.76 mm/s,比其它微机器人小得多。同时,该机器人只能向前运动,人们无法控制其转向和速度。此外,研究人员放弃了传统的电子控制器,这使机器人的功能升级更为困难,并且限制了外部控制与交互。