本文经AI新媒体量子位(公众号ID:QbitAI)授权转载,转载请联系出处。
行驶在高速公路上的自动驾驶重卡,时速保持在 80-100 km/h,即每秒移动大约 25 米。
刹车距离,就会是乘用车的 2 倍。

这样的情况下,要保证行车安全,感知距离起码要达到 300 米以上。
车辆“看”得越远、测得越准,就越能精确地判断前车动向,做出合理的预判,保障行车安全。
这就是嬴彻科技最新发布的超长距精准3D感知技术要解决的问题。
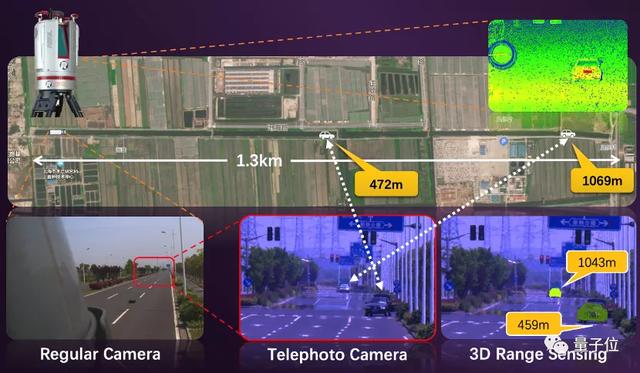
不仅感知距离可以达到 1000 米,嬴彻还在行业内首次提到了测距精度——
1000米感知距离下,测距误差能达到5%以下。
兼顾超长距和精准的识别效果,并且不需要额外的传感器,嬴彻的技术团队是如何做到?
其中诀窍,嬴彻CTO杨睿刚博士同量子位进行了分享。
超长距精准3D感知技术
无论是激光雷达还是毫米波雷达,有效感知距离也不过 150-200 米。
在长距离的感知上,主要需要依靠相机作为传感器。
杨睿刚博士介绍,目前主要的技术有两种:
其一,双目立体视觉测距。即通过两个摄像头来观测同一物体,通过三角化来得到三维距离。
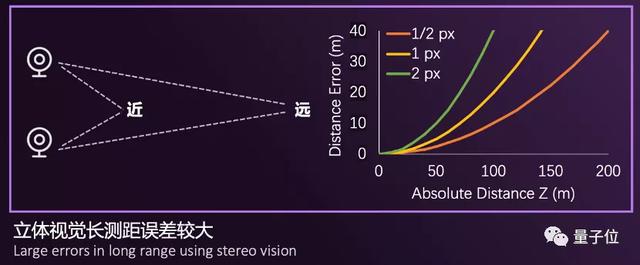
这一方案的缺点在于,对于超长距而言,双目测距的误差随距离的平方增长。举个例子,如果在 100 米时,测距误差是 1 米,那么当距离达到 1000 米,误差就会达到 100 米。
其二,直接通过回归或者一些简单几何的方法来计算前方物体的深度信息。
这种方法产生的误差在15%-20%左右。不仅如此,在超长距上,标注数据不足,很难对移动物体的细节进行处理。
针对这些问题,嬴彻的解决方案——把前景和背景分开来做处理。
背景,是指前方的整个静态环境。嬴彻的超长距精准3D感知技术,结合激光雷达,把激光点云作为控制点,然后由近及远,通过图像的方法计算深度。
杨睿刚博士解释说:
你可以想象在一张图像上,有些点带有深度信息,但更多的点没有。
通过无监督深度学习,我们把这些带有深度信息的点,从近到远地扩展出去,就可以得到很好的长距离背景深度图像。
而前景,就是前方行驶的车辆。
对于车辆,嬴彻采用了经典几何方法来进行处理。
具体而言,是对车辆直接进行检测,通过将车辆进行部件级拆解,将其与三维模型做精准拟合。通过拟合出来的三维模型, 结合背景的深度图片,就可以得到车辆的位姿信息,包括距离,朝向等,实现了超长距离的三维感知。
这一套方案,被称为“场景深度感知 + 前景车辆部件级解析”。用更通俗的话说,就是深度学习方法和基于几何的经典计算机视觉方法的有机结合。
这样一来,无论是对近景还是远景,系统对于整个环境都能有很好的感知。
另外,在相对恶劣的天气条件下,比如雨天、雾天,激光雷达、摄像头这些基于光学信号的传感器,都会受到影响。
为此,嬴彻也基于计算摄影学(computational photography)技术,开发了应对的去雨去雾算法,保障感知距离和感知精度。
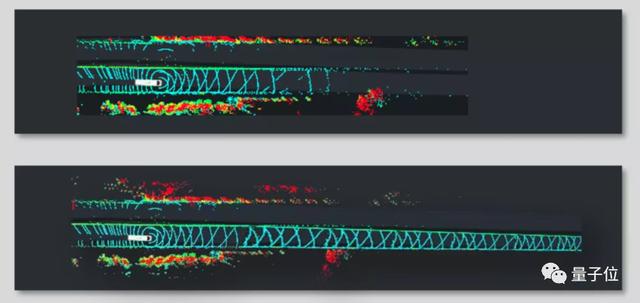
如上图所示,嬴彻用静态三维扫描的方法对其算法进行了严格的实地验证,实验证明,嬴彻的超长距3D感知技术在距离为 1000 米的时候,测距精度能达到 5%以内。
在深度三维测距的精确度上,该技术已经达到了世界领先水平。
有何价值?
杨睿刚博士介绍,感知距离每增加 100 米,系统可增加 4 秒的预警和应对时间。嬴彻科技的超长距精准 3D 感知技术为自动驾驶卡车显著增加更多的路径选择和执行时间,为自动驾驶卡车的安全与节能带来了突破性提升的机会。
更重要的一点是,这套方案没有用到额外的传感器,借助现在自动驾驶车辆上标配的激光雷达、中焦长焦相机就可以实现。
也就是说,要把这套方案应用到实际的自动驾驶重卡上,不需要在车上加装任何额外的硬件,进行任何硬件层面上的改造、升级。
而这样的操作,也符合嬴彻“车规级,前装量产”的路线。
“我们的目标就是量产”
杨睿刚博士是全球知名的计算机视觉科学家,之前担任百度机器人和自动驾驶实验室主任及首席3D视觉科学家。
而加入嬴彻担任CTO,正是因为认同嬴彻“对技术的极致追求,对商业价值的理性判断”。
在与技术团队磨合的几个月中,杨睿刚博士更加坚定了对量产落地L3自动驾驶货运的信心。
因为这个年轻的团队,每个人都“目标非常明确,奔着量产拼劲十足”。
杨睿刚认为,现在,自动驾驶领域的竞争氛围是热烈友好的,大家互相比拼技术的同时,也在开源平台、开源数据集,共同推动自动驾驶行业的发展。
并且,现在自动驾驶这个市场也足够大,每个赛道都有足够多的机会。接下来,谁能脱颖而出,还是要看落地的能力。
在杨睿刚看来,L4级完全无人驾驶的商业化落地还有很长一段路要走。嬴彻选择的,是一条渐进式的发展路线。L3级自动驾驶货运,借助自动驾驶技术,把驾驶员变成管理员,来节省人力、降低司机的劳动强度。
嬴彻的量产之路目标明确,发展速度也令人瞩目。
今年4月,嬴彻科技分别与东风商用车、中国重汽联合开发的L3级自动驾驶重卡A样车相继完成。
按照嬴彻给出的时间表,2021年年底,嬴彻将联合中国主机厂批量交付L3自动驾驶卡车,向客户提供覆盖全国的自动驾驶卡车服务网络,真正开始为用户持续带来商业价值。
One More Thing
杨睿刚介绍说,嬴彻还于正在举办的世界人工智能大会上分享更多自动驾驶卡车量产的最新进展。
除了这项全球领先的超长距精准3D感知技术,嬴彻还发布了高性能自动驾驶计算平台Inceptio M51。同时,嬴彻还与中国重汽联合展示L3自动驾驶重卡量产工程样车,展现深厚的汽车产业底蕴与自动驾驶新兴力量的有效融合。
一方面大力投入自动驾驶卡车核心软硬件的研发,另一方面坚定投入与汽车产业伙伴的量产合作。
对于自动驾驶卡车的如期成功量产,嬴彻表示充满信心。