












本文主要介绍了 Go 程序为了实现极高的并发性能,其内部调度器的实现架构(G-P-M 模型),以及为了最大限度利用计算资源,Go 调度器是如何处理线程阻塞的场景。
怎么让我们的系统更快
随着信息技术的迅速发展,单台服务器处理能力越来越强,迫使编程模式由从前的串行模式升级到并发模型。
并发模型包含 IO 多路复用、多进程以及多线程,这几种模型都各有优劣,现代复杂的高并发架构大多是几种模型协同使用,不同场景应用不同模型,扬长避短,发挥服务器的最大性能。
而多线程,因为其轻量和易用,成为并发编程中使用频率最高的并发模型,包括后衍生的协程等其他子产品,也都基于它。
并发 ≠ 并行
并发 (concurrency) 和 并行 ( parallelism) 是不同的。
在单个 CPU 核上,线程通过时间片或者让出控制权来实现任务切换,达到 "同时" 运行多个任务的目的,这就是所谓的并发。但实际上任何时刻都只有一个任务被执行,其他任务通过某种算法来排队。
多核 CPU 可以让同一进程内的 "多个线程" 做到真正意义上的同时运行,这才是并行。
进程、线程、协程
进程:进程是系统进行资源分配的基本单位,有独立的内存空间。
线程:线程是 CPU 调度和分派的基本单位,线程依附于进程存在,每个线程会共享父进程的资源。
协程:协程是一种用户态的轻量级线程,协程的调度完全由用户控制,协程间切换只需要保存任务的上下文,没有内核的开销。
线程上下文切换
由于中断处理,多任务处理,用户态切换等原因会导致 CPU 从一个线程切换到另一个线程,切换过程需要保存当前进程的状态并恢复另一个进程的状态。
上下文切换的代价是高昂的,因为在核心上交换线程会花费很多时间。上下文切换的延迟取决于不同的因素,大概在在 50 到 100 纳秒之间。考虑到硬件平均在每个核心上每纳秒执行 12 条指令,那么一次上下文切换可能会花费 600 到 1200 条指令的延迟时间。实际上,上下文切换占用了大量程序执行指令的时间。
如果存在跨核上下文切换(Cross-Core Context Switch),可能会导致 CPU 缓存失效(CPU 从缓存访问数据的成本大约 3 到 40 个时钟周期,从主存访问数据的成本大约 100 到 300 个时钟周期),这种场景的切换成本会更加昂贵。
Golang 为并发而生
Golang 从 2009 年正式发布以来,依靠其极高运行速度和高效的开发效率,迅速占据市场份额。Golang 从语言级别支持并发,通过轻量级协程 Goroutine 来实现程序并发运行。
Goroutine 非常轻量,主要体现在以下两个方面:
上下文切换代价小: Goroutine 上下文切换只涉及到三个寄存器(PC / SP / DX)的值修改;而对比线程的上下文切换则需要涉及模式切换(从用户态切换到内核态)、以及 16 个寄存器、PC、SP…等寄存器的刷新;
内存占用少:线程栈空间通常是 2M,Goroutine 栈空间最小 2K;
Golang 程序中可以轻松支持10w 级别的 Goroutine 运行,而线程数量达到 1k 时,内存占用就已经达到 2G。
Go 调度器实现机制:
Go 程序通过调度器来调度Goroutine 在内核线程上执行,但是 Goroutine 并不直接绑定 OS 线程 M - Machine运行,而是由 Goroutine Scheduler 中的 P - Processor (逻辑处理器)来作获取内核线程资源的『中介』。
Go 调度器模型我们通常叫做G-P-M 模型,他包括 4 个重要结构,分别是G、P、M、Sched:
G:Goroutine,每个 Goroutine 对应一个 G 结构体,G 存储 Goroutine 的运行堆栈、状态以及任务函数,可重用。
G 并非执行体,每个 G 需要绑定到 P 才能被调度执行。
P: Processor,表示逻辑处理器,对 G 来说,P 相当于 CPU 核,G 只有绑定到 P 才能被调度。对 M 来说,P 提供了相关的执行环境(Context),如内存分配状态(mcache),任务队列(G)等。
P 的数量决定了系统内最大可并行的 G 的数量(前提:物理 CPU 核数 >= P 的数量)。
P 的数量由用户设置的 GoMAXPROCS 决定,但是不论 GoMAXPROCS 设置为多大,P 的数量最大为 256。
M: Machine,OS 内核线程抽象,代表着真正执行计算的资源,在绑定有效的 P 后,进入 schedule 循环;而 schedule 循环的机制大致是从 Global 队列、P 的 Local 队列以及 wait 队列中获取。
M 的数量是不定的,由 Go Runtime 调整,为了防止创建过多 OS 线程导致系统调度不过来,目前默认最大限制为 10000 个。
M 并不保留 G 状态,这是 G 可以跨 M 调度的基础。
Sched:Go 调度器,它维护有存储 M 和 G 的队列以及调度器的一些状态信息等。
调度器循环的机制大致是从各种队列、P 的本地队列中获取 G,切换到 G 的执行栈上并执行 G 的函数,调用 Goexit 做清理工作并回到 M,如此反复。
理解 M、P、G 三者的关系,可以通过经典的地鼠推车搬砖的模型来说明其三者关系:
地鼠(Gopher)的工作任务是:工地上有若干砖头,地鼠借助小车把砖头运送到火种上去烧制。M 就可以看作图中的地鼠,P 就是小车,G 就是小车里装的砖。
弄清楚了它们三者的关系,下面我们就开始重点聊地鼠是如何在搬运砖块的。
Processor(P):
根据用户设置的 GoMAXPROCS 值来创建一批小车(P)。
Goroutine(G):
通过 Go 关键字就是用来创建一个 Goroutine,也就相当于制造一块砖(G),然后将这块砖(G)放入当前这辆小车(P)中。
Machine (M):
地鼠(M)不能通过外部创建出来,只能砖(G)太多了,地鼠(M)又太少了,实在忙不过来,刚好还有空闲的小车(P)没有使用,那就从别处再借些地鼠(M)过来直到把小车(P)用完为止。
这里有一个地鼠(M)不够用,从别处借地鼠(M)的过程,这个过程就是创建一个内核线程(M)。
需要注意的是:地鼠(M) 如果没有小车(P)是没办法运砖的,小车(P)的数量决定了能够干活的地鼠(M)数量,在 Go 程序里面对应的是活动线程数;
在 Go 程序里我们通过下面的图示来展示 G-P-M 模型:
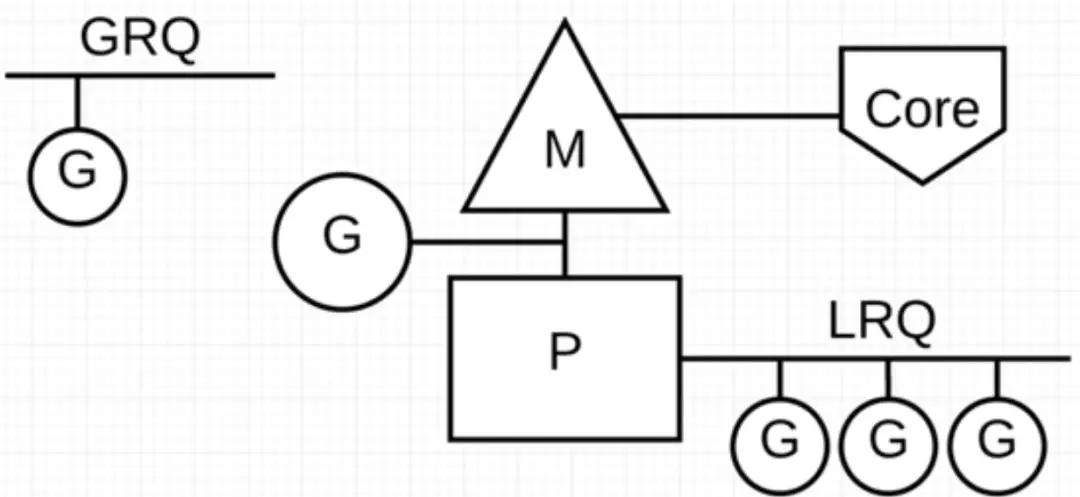
P 代表可以“并行”运行的逻辑处理器,每个 P 都被分配到一个系统线程 M,G 代表 Go 协程。
Go 调度器中有两个不同的运行队列:全局运行队列(GRQ)和本地运行队列(LRQ)。
每个 P 都有一个 LRQ,用于管理分配给在 P 的上下文中执行的 Goroutines,这些 Goroutine 轮流被和 P 绑定的 M 进行上下文切换。GRQ 适用于尚未分配给 P 的 Goroutines。
从上图可以看出,G 的数量可以远远大于 M 的数量,换句话说,Go 程序可以利用少量的内核级线程来支撑大量 Goroutine 的并发。多个 Goroutine 通过用户级别的上下文切换来共享内核线程 M 的计算资源,但对于操作系统来说并没有线程上下文切换产生的性能损耗。
为了更加充分利用线程的计算资源,Go 调度器采取了以下几种调度策略:
任务窃取(work-stealing)
我们知道,现实情况有的 Goroutine 运行的快,有的慢,那么势必肯定会带来的问题就是,忙的忙死,闲的闲死,Go 肯定不允许摸鱼的 P 存在,势必要充分利用好计算资源。
为了提高 Go 并行处理能力,调高整体处理效率,当每个 P 之间的 G 任务不均衡时,调度器允许从 GRQ,或者其他 P 的 LRQ 中获取 G 执行。
减少阻塞
如果正在执行的 Goroutine 阻塞了线程 M 怎么办?P 上 LRQ 中的 Goroutine 会获取不到调度么?
在 Go 里面阻塞主要分为一下 4 种场景:
场景 1:由于原子、互斥量或通道操作调用导致 Goroutine 阻塞,调度器将把当前阻塞的 Goroutine 切换出去,重新调度 LRQ 上的其他 Goroutine;
场景 2:由于网络请求和 IO 操作导致 Goroutine 阻塞,这种阻塞的情况下,我们的 G 和 M 又会怎么做呢?
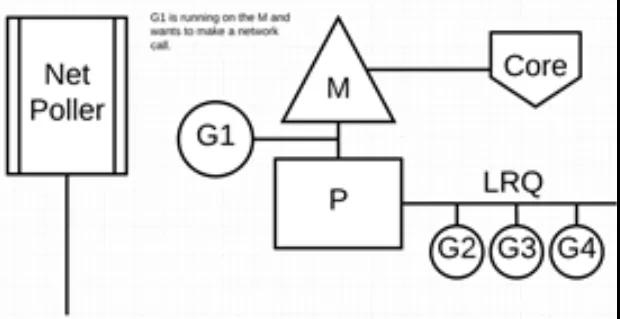
Go 程序提供了网络轮询器(NetPoller)来处理网络请求和 IO 操作的问题,其后台通过 kqueue(MacOS),epoll(Linux)或 iocp(Windows)来实现 IO 多路复用。
通过使用 NetPoller 进行网络系统调用,调度器可以防止 Goroutine 在进行这些系统调用时阻塞 M。这可以让 M 执行 P 的 LRQ 中其他的 Goroutines,而不需要创建新的 M。有助于减少操作系统上的调度负载。
下图展示它的工作原理:G1 正在 M 上执行,还有 3 个 Goroutine 在 LRQ 上等待执行。网络轮询器空闲着,什么都没干。
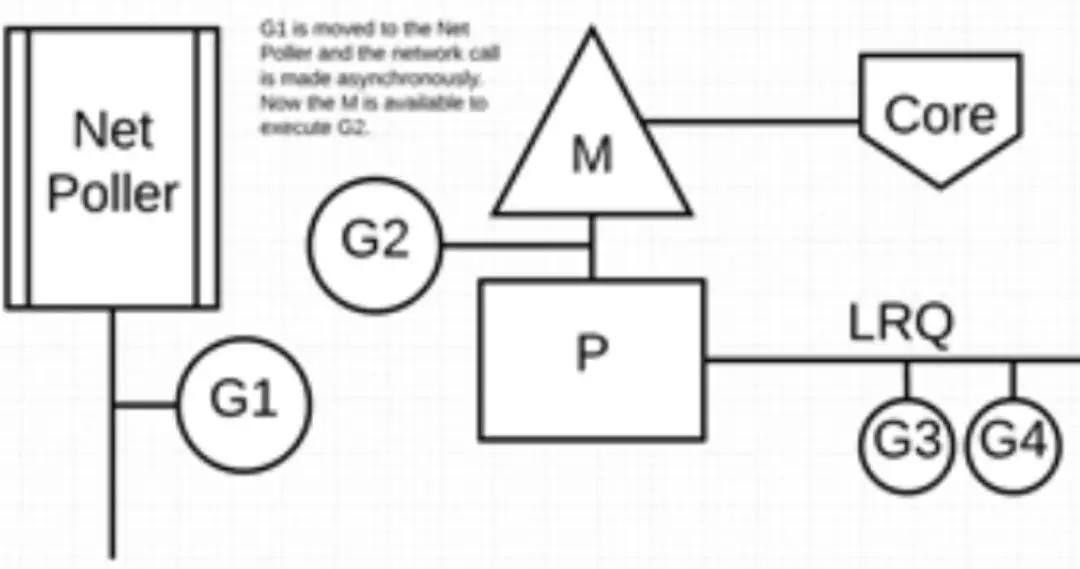
接下来,G1 想要进行网络系统调用,因此它被移动到网络轮询器并且处理异步网络系统调用。然后,M 可以从 LRQ 执行另外的 Goroutine。此时,G2 就被上下文切换到 M 上了。
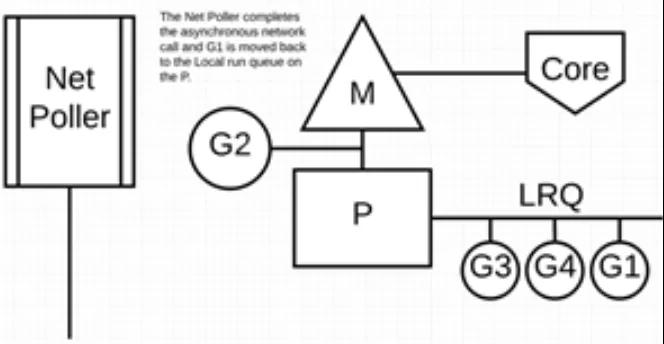
最后,异步网络系统调用由网络轮询器完成,G1 被移回到 P 的 LRQ 中。一旦 G1 可以在 M 上进行上下文切换,它负责的 Go 相关代码就可以再次执行。这里的最大优势是,执行网络系统调用不需要额外的 M。网络轮询器使用系统线程,它时刻处理一个有效的事件循环。
这种调用方式看起来很复杂,值得庆幸的是,Go 语言将该“复杂性”隐藏在 Runtime 中:Go 开发者无需关注 socket 是否是 non-block 的,也无需亲自注册文件描述符的回调,只需在每个连接对应的 Goroutine 中以“block I/O”的方式对待 socket 处理即可,实现了 goroutine-per-connection 简单的网络编程模式(但是大量的 Goroutine 也会带来额外的问题,比如栈内存增加和调度器负担加重)。
用户层眼中看到的 Goroutine 中的“block socket”,实际上是通过 Go runtime 中的 netpoller 通过 Non-block socket + I/O 多路复用机制“模拟”出来的。Go 中的 net 库正是按照这方式实现的。
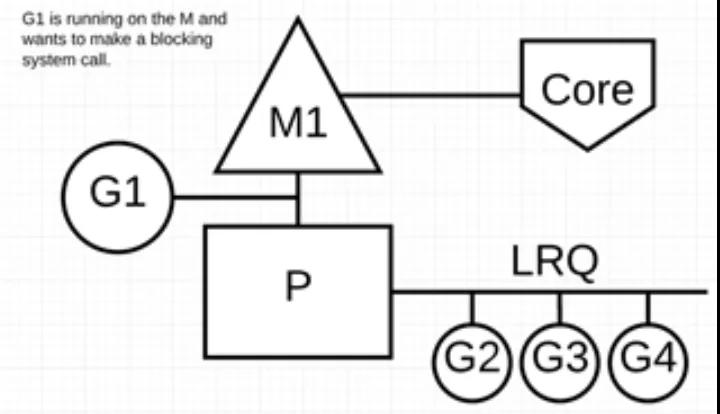
场景 3:当调用一些系统方法的时候,如果系统方法调用的时候发生阻塞,这种情况下,网络轮询器(NetPoller)无法使用,而进行系统调用的 Goroutine 将阻塞当前 M。
让我们来看看同步系统调用(如文件 I/O)会导致 M 阻塞的情况:G1 将进行同步系统调用以阻塞 M1。
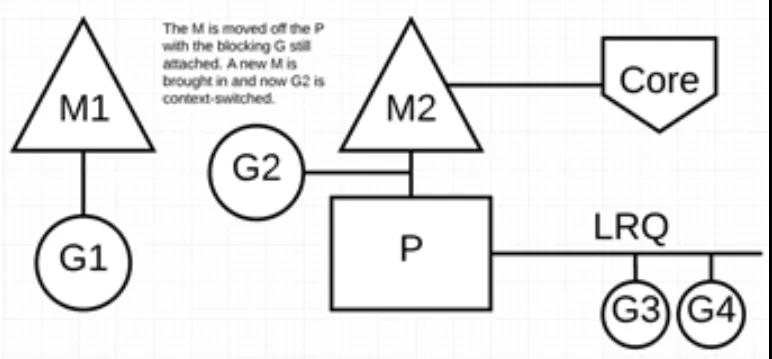
调度器介入后:识别出 G1 已导致 M1 阻塞,此时,调度器将 M1 与 P 分离,同时也将 G1 带走。然后调度器引入新的 M2 来服务 P。此时,可以从 LRQ 中选择 G2 并在 M2 上进行上下文切换。
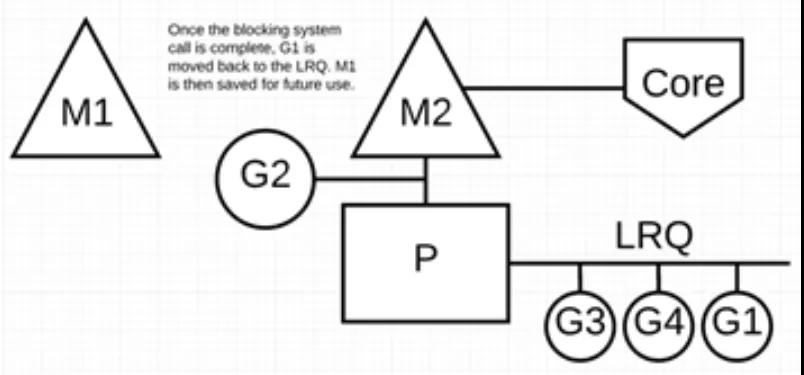
阻塞的系统调用完成后:G1 可以移回 LRQ 并再次由 P 执行。如果这种情况再次发生,M1 将被放在旁边以备将来重复使用。
场景 4:如果在 Goroutine 去执行一个 sleep 操作,导致 M 被阻塞了。
Go 程序后台有一个监控线程 sysmon,它监控那些长时间运行的 G 任务然后设置可以强占的标识符,别的 Goroutine 就可以抢先进来执行。
只要下次这个 Goroutine 进行函数调用,那么就会被强占,同时也会保护现场,然后重新放入 P 的本地队列里面等待下次执行。
小结
本文主要从 Go 调度器架构层面上介绍了 G-P-M 模型,通过该模型怎样实现少量内核线程支撑大量 Goroutine 的并发运行。以及通过 NetPoller、sysmon 等帮助 Go 程序减少线程阻塞,充分利用已有的计算资源,从而最大限度提高 Go 程序的运行效率。



















