












依靠介入头部的 2 个传感器,法国里昂的一名瘫痪男子 Thibault 实现了操控外骨骼装备来助力行走。
科学家将 2 个植入物放置在 Thibault 大脑表面的运动控制部位,每个植入物有 64 个电极,同时有软件可以将电极读取的脑电波转换为运动指令。
10 月 3 日,法国格勒诺布尔-阿尔卑斯大学教授 Alim-Louis Benabid 将这个研究发表在《柳叶刀-神经生物学》(The Lancet Neurology)上。
一、71% 解码成功率
4 年前,Thibault 从一个夜总会 15 米高的阳台掉下来,导致四肢瘫痪,之后的两年他一直躺在医院的病床上。2017 年,他接受了法国 Clinatec 公司与格勒诺布尔-阿尔卑斯大学的外骨骼研究实验。
最初他在视频游戏里训练控制虚拟角色,之后穿上这套外骨骼装备最终实现了行走。
这个研究在 2017 年 6 月 12 日到 2019 年 7 月 21 日期间进行。经过 20 多个月各种类型训练,Thibault 已经可以凭借大脑信号控制这个外骨骼装备,并可以实现缓慢行走以及暂停。当他想走路时,这个外骨骼机器人就会发生一系列动作,让他的双腿向前移动。他还可以控制手臂自由活动。只是从大脑发出指令到实现运动有 350 毫秒的时差,否则系统就难以控制了。

Thibault 在穿戴外骨骼后行走。来源:FONDS DE DOTATION CLINATEC

Thibault 在控制手臂运动。来源:FONDS DE DOTATION CLINATEC
这套设备是一种吊装式的安全行走系统,看起来像一套游戏装备,它能够提供长时间的高分辨率脑电记录,并将运动意图进行实时解码。
30 岁的 Thibault 表示,对于他这个两年不能走路的瘫痪患者,如今他行走的时候感觉就像阿姆斯特朗在月球漫步。
这套设备重达65 公斤,所以尚无法让患者实现完全自主运动。四肢瘫痪的患者直立行走有困难,他需要安全保障设备吊在天花板上,以避免跌倒。这也是这套装备还不能走出实验室的主要原因。
Thibault 在视频游戏里的成功率为64%,现实中使用这套装备碰触目标的成功率为71%。如今,研究人员计划让 Thibault 训练用手指抓取物体。
二、半侵入式的脑机接口
神经外科医生 Alim-Louis Benabid 是 Clinatec 公司的创始人之一,他希望这家创办于 2006 年的公司能够帮助那些四肢瘫痪的患者、神经退行性疾病患者以及预后不良的癌症患者。
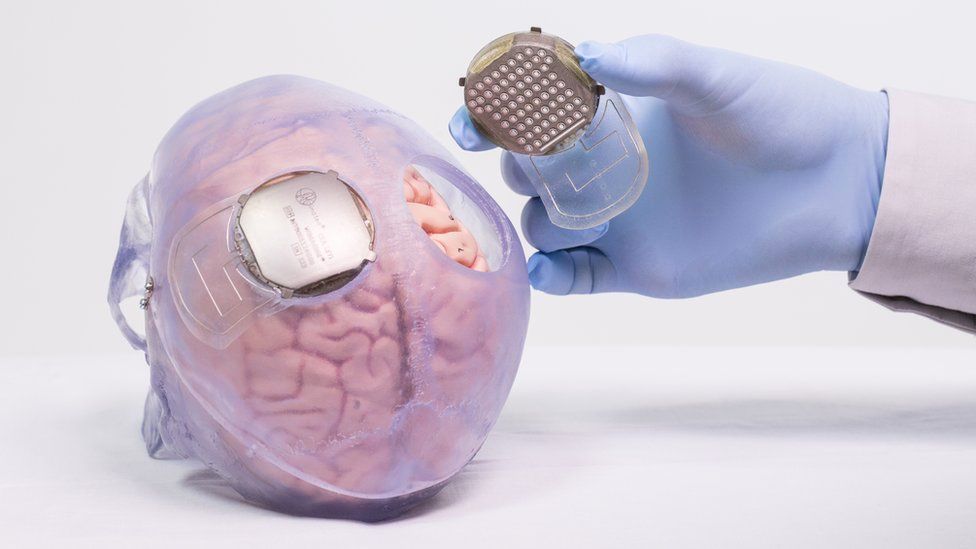
Thibault 大脑表面两侧放置了 2 个植入物,可读取控制运动的脑电信号。来源:FONDS DE DOTATION CLINATEC

每个植入物有 64 个电极,可读取大脑运动指令。来源:FONDS DE DOTATION CLINATEC
他们给 Thibault 使用的电极不刺入大脑。这种硬膜外皮质脑电(ECoG)具有半浸润性,解码模型可以每 7 周校准一次。这套系统是无线控制,颅骨植入式,且具备长期生物相容性。
这套外骨骼是一个机器人神经假体,具有 4 个可穿戴且完全机动化的肢体,有 14 个关节。患者身负一个背包计算机来接受皮质脑电信号,后者被解码为一维、二维或三维的运动信号。后者每 100 毫秒就被发射到外骨骼控制器,转换为运行指令,从而产生运动。只是这套系统没有平衡装置,因此需要天花板上的装置来防止跌倒。
Thibault 的手术是在全麻状态下进行的,这是一个半侵入式的手术:5 厘米直径的颅骨切开术,电极在大脑硬膜外放置可防止颅内感染,大脑无电极穿透,无线信号传输。
研究人员本来招募了 2 名受试者,其中一名受试者在植入物放置激活后很快中断了通讯,于是退出了测试。只有 Thibault 完成了测试。
专访美国从事康复医学研发的博士林方:这是高位截瘫患者的福音
DeepTech:这个外骨骼设备看起来比较笨重,远远没有科幻中的便捷,那么怎么评价它在临床上的突破?
林方:科幻中的外骨骼,比如说钢铁侠那样的,基本上是生物学上的外骨骼含义,类似螃蟹的壳,钢铁侠的外骨骼就是壳。
而设计来帮助增强人体功能的外骨骼,也就是这篇论文里报道的这种,虽然也会有可穿戴性,和壳的概念是完全不同的。这种叫 powered exoskeleton,即有动力的外骨骼。这种外骨骼不可能是壳的形状,而是由动力驱动来完成或辅助完成人体本来的运动功能。
论文报道的外骨骼确实也比康复医学中已经应用的几种外骨骼系统更为笨重,主要是这个系统针对的是高位截瘫病人,比如报道中的 Thibault 是自肩膀以下瘫痪,这样的截瘫属于四肢瘫痪,连手臂都不能发力,所以给他们用的外骨骼系统必须提供可靠的直立支撑功能,而不像其它一些系统比如 SuitX’s Phoenix 那样轻巧,后者是给上肢功能齐全可以使用手杖支撑身体直立的下肢瘫痪患者。
DeepTech:与其他脑机接口研究相比,这个研究在临床上最大的优势是什么?
林方:该研究的突破在于使用了更先进的脑机接口技术以及整个外骨骼系统控制的训练方式。
之前康复用的外骨骼是肌电信号控制,而这个研究里使用了脑机接口(也许不是首次),也就是依靠使用者的意念来控制外骨骼的动作。其突破具体而言,一是使用了皮层表面电极而不是脑组织的刺入式电极,二是植入了两组电极可以控制身体的双侧也就是四肢,三是皮层电信号的传输是无线的。
其训练方式是循序渐进的,基本上是让病人从控制单一自由度的肢体运动开始慢慢进展到可以控制 8 个自由度。
另外据论文报道,已经训练定标好的控制模型,可以长达 7 周不需要重新训练定标。
该研究的临床优势是,电极不刺入脑组织和无线传输信号,侵入性低,创伤小也更不容易感染。同时,7 周不需要重新训练定标,降低了病人和治疗师的负担。
DeepTech:这个设备在虚拟游戏中的成功率为 64%,在实验室中成功率 70.9%,那么是哪些因素影响到设备操控的成功率?
林方:很多因素。皮层电信号的质量、解读的准确性(牵涉到使用什么模型来解码)、控制系统的鲁棒性等等。
还有一个方面也是不可忽略的,就是病人一旦可以操控外骨骼系统行走和做各种日常活动(尽管仍然是比较简单的),也就是说把外骨骼系统当成其身体的一部分了,而大脑有可塑性,会不会因此而使大脑的神经运动控制方式发生变化,所以解码/控制系统的调整也不可能完全一调定终生,必须适时调整。目前是 7 周之后需要调整,那么将来呢?所以什么时候需要调整也是个非常有意思的研究问题。
DeepTech:外骨骼设备的思路是不是目前最适合帮助瘫痪患者的?
林方:不一定。如何帮助瘫痪的残障人士需要具体分析他们失去了什么功能,身体还余留了什么样的功能,他们的康复目标是什么,这样才能具体明白每个残障人士需要什么样的帮助。外骨骼设备仅仅是选择之一而已,尽管是现在比较热门的方面。























