













随着移动互联网技术的发展,自动化仓储技术也日趋成熟,并得到大量的应用。其中典型的自动引导运输车(AGV)设备,在物流仓储的拣货、分拣等环节大大提升了运转效率,提升质量的同时降低了运营成本。而AGV设备的快速、稳定运行,需要依赖高可靠的Wi-Fi网络,特别是对Wi-Fi网络的漫游能力有更高的要求。本文将针对自动仓储的Wi-Fi网络进行深入探讨。
图1: AGV示意图
探索自动化仓储对Wi-Fi网络的需求
AGV属于轮式移动机器人(Wheeled Mobile Robot)的范畴,更直接点就是无人驾驶(Driverless)的运输车。AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势,且无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。因此,在自动化仓储系统中,AGV是最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产。
说了AGV这么多特点,我们不禁要问:这与Wi-Fi网络的无缝漫游有什么直接关系呢?带着这个疑问,下面就先给大家分析一下在自动化仓储中真正的网络需求。
从AGV的工作模式分析,AGV必须通过无线通信方式由电脑来控制其行进路线以及行为,这就注定AGV的作业离不开无线网络的支撑,而Wi-Fi网络是AGV采用的最主要的无线通信手段。那么按照传统办公网Wi-Fi思路部署一张无线网络能够支撑AGV业务需求吗?答案是否定的。
如下图2所示,在实际的自动化仓储中,AGV装卸作业需要往返于不同工作区域,单个无线接入点(AP)无法完全覆盖整个区域,因此一个AGV实际需要在多个AP信号之间漫游通讯。
图2: 自动化仓储图示
相比办公网中人的移动速度,AGV的移动速度要快得多,如表1所示,其中视觉二维码导航的AGV在电商物流行业应用比较广泛,其行驶速度可以高达150m/min,所以AGV实际会在多个AP之间会进行快速漫游,但是这个漫游过程中,仍然需要确保AGV与后台的通信交互准确无误,也就是要确保AGV不掉线停车,避免因导致AGV拥堵而严重影响生产作业。
|
磁导航 |
60m/min |
|
视觉二维码+惯导 |
90m~150m/min |
|
激光导航 |
150m/min |
表1: AGV运行速度
下面,我们分析下Wi-Fi漫游的技术难点,以及传统的漫游方式为什么不能满足AGV的需求。
但是在当前的自动化仓储场景中,客户一般是利用传统WLAN技术部署Wi-Fi网络,并集成了传统的漫游技术,但是对于AGV的稳定运行,其实际效果并不是很理想。
剖析自动化仓储传统Wi-Fi漫游解决方案的乏力
自动化仓储漫游问题分析
1. 传统的漫游过程,一般分为三步:
预漫游状态:如下图3所示。
- 进入条件:信号强度≤预漫游阈值;
- 操作行为:扫描信道, 存入漫游列表;
- 持续时间:信号强度升高于阈值后恢复;
- 体验影响:扫描期间不收包, 通信中断,造成时延增大/丢包。
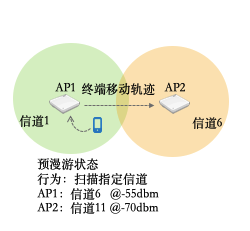
图3:预漫游状态图
终端漫出状态:如下图4所示。
- 进入条件:信号强度≤漫出阈值;
- 操作行为:断开旧AP连接;
- 持续时间:瞬间行为;
- 体验影响:此时终端处于断开状态,不收发报文。
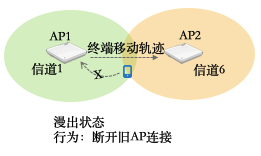
图4:漫出状态图
终端漫入状态:如下图5所示。
- 进入条件:漫游列表内有信号好的AP;
- 操作行为:终端重新与AP关联;
- 持续时间:一般终端完成关联在300ms以内;
- 体验影响:关联完成之前,终端网络处于无连接状态,不收发报文。
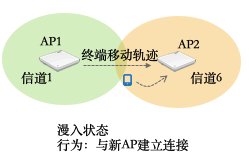
图5:漫入状态图
2. 在传统漫游过程中所存在的问题分析:
- 预漫游阶段:由于当前终端漫游的算法不够完善,导致预漫游效果较差,终端在离开当前无线网络区域时往往会掉线一段时间才能接入新的无线网络中;
- 漫出阶段:可能由于漫出AP覆盖的区域范围较大,虽然当前终端所能接收到的信号质量已经很差,但是还是无法切换到新的AP中,从而引发漫游粘滞问题;
- 漫入阶段:可能由于漫入AP信号覆盖的区域范围较小,导致终端在脱离漫出AP时依旧无法接入到漫入的AP中,导致终端短时间掉线,影响整个业务的稳定运行。
另外,在传统漫游方案中,对于漫游切换的动作,主动权在终端无线网卡上,AP端是无法直接控制的,总会存在无线网络短暂中断的状态。
那么,无线设备厂商针对传统漫游问题的优化方案是什么呢?接下来我们来看一下,传统无线厂商基于AP层面的优化手段。
传统Wi-Fi网络的漫游优化方案
针对传统漫游中存在的问题,传统无线厂商做了很多的努力,在自动化仓储传统漫游解决方案中基本解决了AP端漫游的很多问题。下面通过一个终端由AP1漫游到AP2中的:预漫游、漫出、漫入等三个不同状态,详细了解下传统漫游优化方案。
预漫游状态:如图6所示,利用零网优技术 (DWO,Distributed Wireless Optimize),调整漫出AP的覆盖范围,让终端更早进入自己的漫游状态机,主要包括三个层面的优化:
- 信道扫描逻辑优化;
- 信道扫描时间优化;
- 漫游状态机优化。
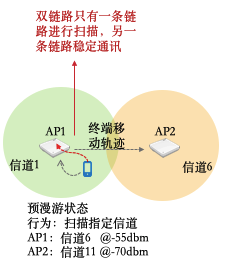
图6:预漫游状态优化图
漫出状态:如图7所示,通过智能漫游手段以终端RSSI信号强度为依据,当AP在检测到终端RSSI信号强度到阈值(终端不同参数不同)一般是-70dBm左右时,主动踢终端下线,迫使终端进行漫游。
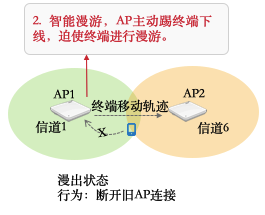
图7:漫出状态优化图
漫入状态:如图8所示,利用DWO技术,主动调整漫入AP的覆盖范围、发射功率、信道宽度以及优化切换时间:
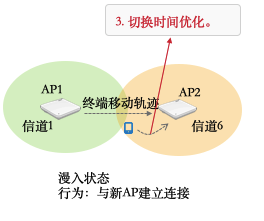
图8:漫入状态优化图
如上所述,对于传统Wi-Fi问题,AP也只能通过优化手段间接影响终端的漫游行为,对于传统办公网络来说,基本可以解决问题,从而改善终端的体验。但是在自动化仓储场景中,由于AGV在多个AP间快速漫游,传统漫游优化方案还是无法彻底解决问题。另外,因为AGV设备的无线网卡能力、质量参差不齐,Wi-Fi漫游的效果更佳无法控制。
总结来看,如果要彻底解决AGV快速漫游的体验,需要从以下两个方面入手:
- AGV端Wi-Fi网卡与主机解耦,通过硬件能力统一,实现终端侧Wi-Fi漫游行为的可控;
- 基于现有Wi-Fi协议设计新的漫游机制。
自动化仓储Wi-Fi网络无缝漫游方案给你带来解答。
自动化仓储Wi-Fi网络无缝漫游方案助力自动化仓储业务高速发展
自动化仓储Wi-Fi网络无缝漫游方案架构
自动化仓储Wi-Fi网络无缝漫游方案如下图9所示,其中网络产品组件和应用技术及可达到的效果如下:
- 网络产品组件:无线控制器(AC)、AP,Wi-Fi转换器等;
- 应用技术及可达到的效果:基于双射频聚合链路技术(DRAL,Dual Radio Aggregate Link)及预漫游(Pre-Roam)技术。通过车载Wi-Fi转换器,结合上述两种技术,将无线信号转换为有线信号给终端提供网络,不仅能提高信号稳定性而且解决了兼容性问题;
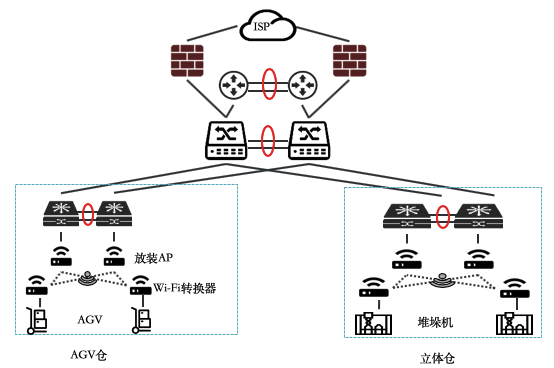
图9: 自动化仓储Wi-Fi网络无缝漫游方案架构图
技术原理详解
1.DRAL技术,如下图10所示。
- Wi-Fi转换器通过主射频卡与备份射频卡与AP之间建立Link A和Link B双数据链路同时将无线网络转有线接入,替换传统Wi-Fi网卡,为AGV提供上行网络连接;
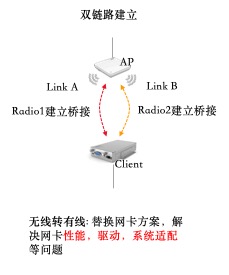
图10: 双链路建立,无线转有线示意图
- 采用去重转发技术。如下图11所示,在建立双链路数据的同时解决无线环路问题。
发生环路的情况:主射频卡、备份射频卡与AP之间建立Link A、Link B双数据链路,若此时两条链路连接的Wi-Fi转换器与AP成功建立通信链路并发生通信时,整个链路就发生了环路。
具体解决方法:
主射频卡与备份射频卡与AP之间建立Link A和Link B双数据链路,两条无线链路同时处于双保活的状态。此时主链路用于数据传输,当主链路正常通信时,备份链路在Wi-Fi转换器与下一个AP信号建立连接处于备份状态。当主射频卡发生漫游时主链路断开时切换到备份链路进行通信。
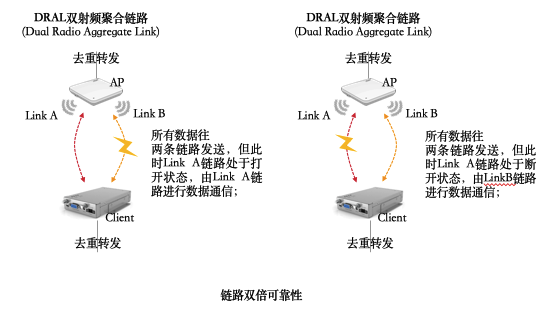
图11: 双链路保活示意图
2. Pre-Roam技术,即双链路预漫游方案,主要解决终端设备在漫游过程中的信号接收问题。
- 在预漫游阶段,Wi-Fi转换器根据事先建立的两条链路中的备份链路进行信号扫描,另一条则稳定通讯,提前主动探测到最合适的漫入信号源,如下图12所示。
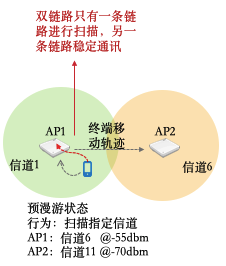
图12: 利用Pre-Roam技术预漫游状态图
- 在漫出阶段:Wi-Fi转换器已经提前主动探测到了最合适的漫入信号源。此时,一条链路进行正常通信,另一条链路执行漫出,如下图13所示。
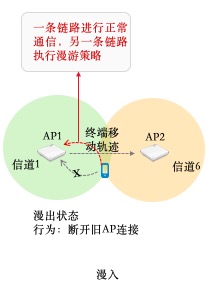
图13: 利用Pre-Roam技术漫出状态图
- 在漫入阶段:Wi-Fi转换器的一条链路已经切换最合适的漫入信号源。此时,需要保证其中一条链路漫游成功后,另一条链路才做切换,如下图14所示。
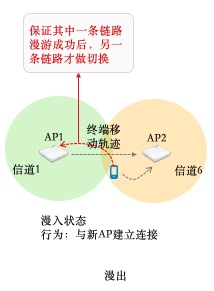
图14: 利用Pre-Roam技术漫入状态图
如上所述,自动化仓储Wi-Fi网络无缝漫游设计,一方面通过Wi-Fi转换器实现AGV端Wi-Fi网卡与主机解耦,通过硬件能力统一,实现终端侧Wi-Fi漫游行为的可控。另一方面,基于现有Wi-Fi协议,通过双射频聚合链路、高效的预漫游机制以及有线转无线的方式,为自动化仓储环境中AGV等智能终端提供了稳定可靠的Wi-Fi网络。
总结
自动化仓储Wi-Fi网络无缝漫游方案简单来说其实是一个融合的网络解决方案,它从不同的问题源出发,致力于解决自动化仓储传统漫游解决方案以及自动化仓储内智能设备的无线网络体验问题。通过无线转有线的方式,借助Wi-Fi转换器实现终端侧Wi-Fi漫游的可控。同时,结合双链路和Pre-Roam技术,有效地保证网络质量的可靠性,满足了AGV快速无缝漫游的需求,从而保证了依赖于无线网络质量的自动化仓储业务能够流畅运行。












