背景
深度学习作为AI时代的核心技术,已经被应用于多个场景。在系统设计层面,由于其具有计算密集型的特性,所以与传统的机器学习算法在工程实践过程中存在诸多的不同。本文将介绍美团平台在应用深度学习技术的过程中,相关系统设计的一些经验。
本文将首先列举部分深度学习算法所需的计算量,然后再介绍为满足这些计算量,目前业界比较常见的一些解决方案。最后,我们将介绍美团平台在NLU和语音识别两个领域中,设计相关系统的经验。
深度学习的计算量
| Model | Input Size | Param Size | Flops |
|---|---|---|---|
| AlexNet | 227 x 227 | 233 MB | 727 MFLOPs |
| CaffeNet | 224 x 224 | 233 MB | 724 MFLOPs |
| VGG-VD-16 | 224 x 224 | 528 MB | 16 GFLOPs |
| VGG-VD-19 | 224 x 224 | 548 MB | 20 GFLOPs |
| GoogleNet | 224 x 224 | 51 MB | 2 GFLOPs |
| ResNet-34 | 224 x 224 | 83 MB | 4 GFLOPs |
| ResNet-152 | 224 x 224 | 230 MB | 11 GFLOPs |
| SENet | 224 x 224 | 440 MB | 21 GFLOPs |
数据来源
上表列举了,ImageNet图像识别中常见算法的模型大小以及单张图片一次训练(One Pass)所需要的计算量。
自2012年,Hinton的学生Alex Krizhevsky提出AlexNet,一举摘下ILSVRC 2012的桂冠后,ILSVRC比赛冠军的准确率越来越高。与此同时,其中使用到的深度学习算法也越来越复杂,所需要的计算量也越来越大。SENet与AlexNet相比,计算量多了近30倍。我们知道,ImageNet大概有120万张图片,以SENet为例,如果要完成100个epoch的完整训练,将需要2.52 * 10^18的计算量。如此庞大的计算量,已经远远超出传统的机器学习算法的范畴。更别说,Google在论文《Revisiting Unreasonable Effectiveness of Data in Deep Learning Era》中提及的、比ImageNet大300倍的数据集。
物理计算性能
面对如此庞大的计算量,那么,我们业界当前常用的计算单元的计算力是多少呢?
- CPU 物理核:一般浮点运算能力在10^10 FLOPS量级。一台16 Cores的服务器,大致上有200 GFLOPS的运算能力。实际运行,CPU 大概能用到80%的性能,那就160 GFLOPS的运算能力。完成上述SENet运行,需要182天。
- NVIDIA GPGPU: 目前的V100,单精度浮点运算的峰值大概为14 TFLOPS, 实际运行中,我们假设能用到50%的峰值性能,那就是7 TFLOPS,需要4天。
根据以上数据结果可以看出:在深度学习领域,GPU训练数据集所需要耗费的时间,远远少于CPU,这也是当前深度学习训练都是采用GPU的重要原因。
业界的解决方案
从前面的计算可知,即使使用GPU来计算,训练一次ImageNet 也需要4天的时间。但对于算法工程师做实验、调参而言,这种耗时数天的等待是难以忍受的。为此,目前业界针对深度学习训练的加速,提出了各种各样的解决方案。
异构计算的并行方案
数据并行(Data Parallelism)
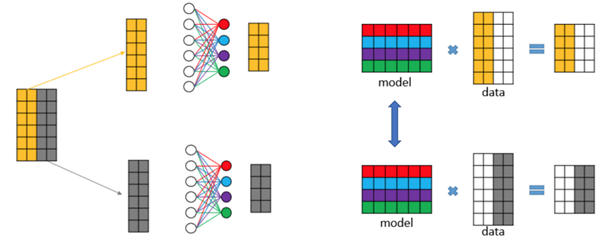
数据并行,即每个计算单元都保留一份完整的模型拷贝,分别训练不同的数据,经过一个Iteration或若干个Iteration后,把各个计算单元的模型做一次同步。这是最常见的深度学习训练方式,好处在于逻辑简单、代码实现方便。
模型并行(Model Parallelism)
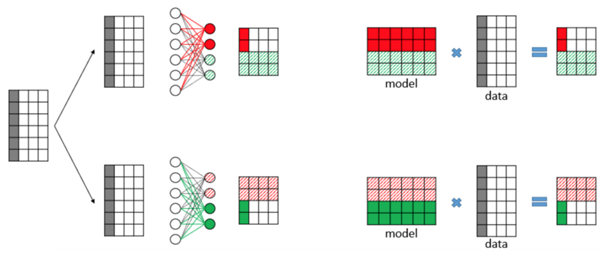
模型并行,即各个计算单元存储同一层模型数据的不同部分,训练相同的数据。相对于数据并行,因为各个运算单元每训练完一层神经网络,就必须要同步一次,频繁的同步通信导致系统不能充分地利用硬件的运算能力,所以更为少见。但是在一些业务场景下,Softmax层需要分类的类别可能会有很多,导致Softmax层太大,单个计算单元无法存储,这个时候,需要把模型切割成若干部分,存储在不同的运算单元。模型并行常见于NLU、推荐、金融等领域。
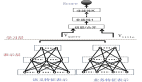
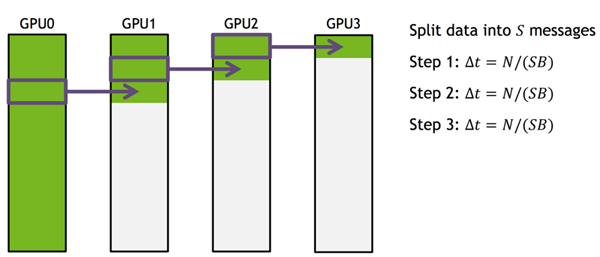
流式并行(Stream Parallelism)
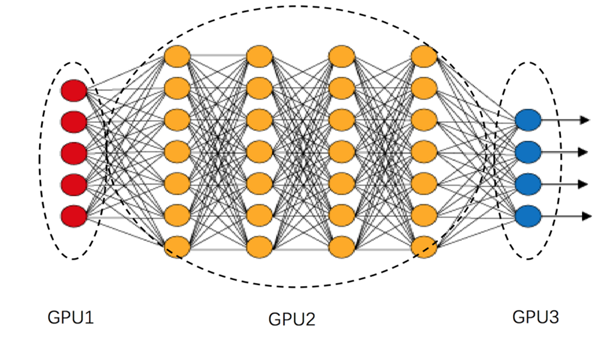
流式并行,即每个计算单元都存储不同层的模型数据,训练相同的数据。如上图所示,GPU1只负责第一层神经网络的计算,GPU2只负责2~5层神经网络的计算,GPU3只负责第6层的计算。流式并行的好处在于每个运算单元之间的通信和计算重叠(overlap),如果配置得当,可以非常充分地利用硬件资源。缺点在于,根据不同的模型,需要平衡好各个计算单元的计算量,如果配置不好,很容易形成“堰塞湖”。如上图所示,很有可能出现GPU1 负责的运算量太少,而GPU2 负责的运算量太多,导致GPU1 和GPU2 之间堵塞住大量的Mini-batch,更常见于线上环境。
混合并行(Hybrid Parallelism)
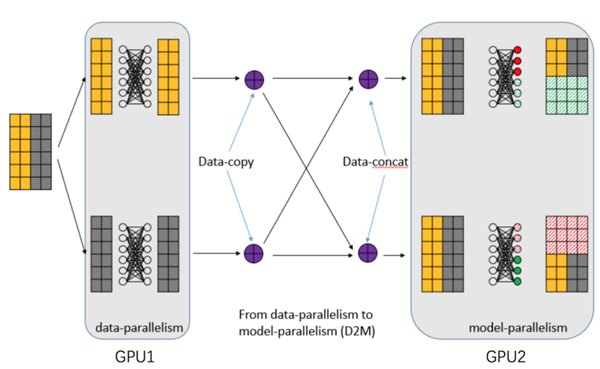
混合并行,即上面提到的并行方式的混合。如对于一些图像识别任务来说,可能前几层使用数据并行,最后的Softmax层,使用模型并行。
异构计算的硬件解决方案
- 单机单卡:一个主机内安装上一块GPU运算卡。常见于个人计算机。
- 单机多卡:一个主机内安装上多块GPU运算卡。常见的有:1机4卡,1机8卡,甚至有1机10卡。一般公司都采取这种硬件方案。
- 多机多卡:多台主机内安装多块GPU运算卡。常见于公司内部的计算集群,一般多机之间采取Infiniband 来实现网络的快速通信。
- 定制化:即类似于Google的TPU解决方案。常见于“巨无霸”公司内部。
异构计算的通信解决方案
根据上面的硬件解决方案,我们以ResNet为例:模型的大小为230M,单张图片运算量为11 GFLPOS,Mini-batch假设为128。可以计算出各个硬件模块在深度学习训练中的耗时比较:
- GPU:对于V100,假设有6 TFLOPS,一次Mini-batch 理论耗时:0.23s。
- PCI-E:常见PCI-E 3.0 * 16,速度为10 GB/s,传输一个模型的理论耗时为:0.023s。
- 网络:假设为10 GB/s的高速网络,传输一个模型的理论耗时:0.023s。
- Disk:普通的磁盘,我们假设200M/s的读取速度,读取一次Mini-batch所需要的图片耗时:0.094s。
根据上面的数据结果,我们似乎可以得出一个结论:PCI-E和网络的传输耗时,相对于GPU来说,整整少了一个数量级,所以网络通信同步的时间可以忽略不计。然而问题并没有那么简单,上面例子中的耗时只是单个模型的耗时,但是对于8卡的集群来说,如果使用数据并行,每次同步就需要传输8份模型,这就导致数据传输的时间和GPU的计算时间“旗鼓相当”。这样的话,GPU就得每训练完一个Mini-batch,都得等候很久的一段时间(采取同步更新),这会浪费很多计算资源。因此,网络通信也需要制定对应的解决方案。下面我们以Nvidia NCCL中单机多卡的通信解决方案为例介绍,而多机多卡的通信解决方案其实是类似的。
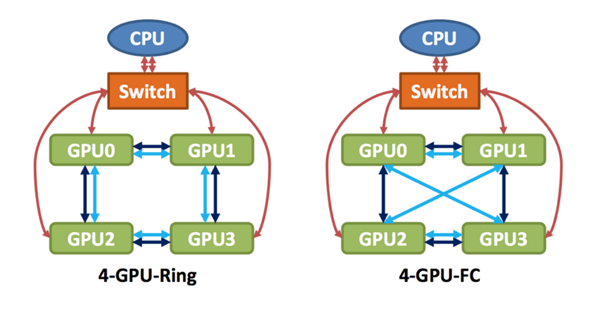
上图是单机4卡机器,在硬件上,两种不同的通信体系。左边为普通的PCI-E通信,即4个GPU之间组成一个环状。右边为NVLink通信,即两两之间相互连接。
常见的通信类型如下图所示:
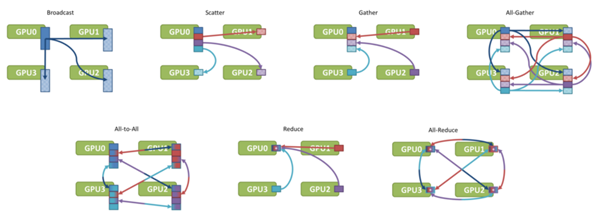
对于深度学习训练而言,关键的两种通信类型为:Broadcast和Reduce。Broadcast用于Master分发最新的模型给各个GPU。Reduce 用于各个GPU计算完Mini-batch后,把模型更新值汇总到Master上。以Broadcast为例,最简单的通信方式是Master往各个GPU上发送数据,这样的耗时就是4次模型传输的时间,通信时间就会太长,一种简单的优化方法如下图所示:
即把所需要传输的数据分成若干块,然后通过接力的方式逐个传递,每个GPU都把自己最新的一块数据发送到下一个GPU卡上。这种传输方式能充分利用硬件层面的通信结构,使得需要的耗时大幅缩减。与此类似的,Reduce的通信优化也可以采取相同的方式进行提速。
美团的定制化深度学习系统
尽管目前在业界已经推出了很多著名的深度学习训练平台,通用的训练平台如TensorFlow、MxNet等等,还有领域专用的训练平台,如语音识别中的Kaldi,但是我们经过调研后,决定内部自主开发一套深度学习系统,理由如下:
- 通用的训练平台,缺乏了领域特色的功能。如语音识别中的特征提取模块和算法。
- 通用的训练平台,通常是基于Data-flow Graph,来对计算图中的每个operator进行建模,所以颗粒度很小,需要调度的单元多,导任务调度复杂。
- 领域特色的训练平台,如Kaldi,在神经网络训练的时候,性能不足。
- 线上业务存在很多特殊性,如果使用TensorFlow之类作为训练平台,不太适合线上业务的情景。
NLU线上系统
线上系统的业务特点
我们在设计NLU线上系统时,考虑了NLU业务的一些特性。发现其具备如下的一些特点:
- 随着业务和技术的变化,算法流程也经常发生变化。
- 算法流程是多个算法串联组成的,不单纯的只有深度学习算法。如分词等算法就不是DL算法。
- 为了能够快速响应一些紧急问题,需要经常对模型进行热更新。
- 更重要的是,我们希望构建一个能以“数据驱动”的自动迭代闭环。
业务多变
NLU任务的算法流程是多层级的,并且业务经常发生变化。如下图所示:
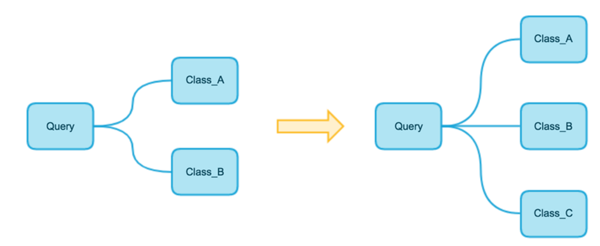
即随着业务要求的变化,NLU系统一开始的算法流程,只需要把一个Query分为两个类,但是到后面,极有可能会变成需要分为三个类别。
热更新
根据业务需求,或者为了紧急处理一些特殊问题,NLU线上系统经常需要做出快速响应,热更新算法模型。如最近的热点词“skr”,几乎是一夜之间,突然火爆起来。如下图所示的微博,如果不能正确理解“skr”的正确语义,可能就不能准确理解这条微博想要表达的意思。
为了避免影响用户体验,我们可能会对NLU系统,马上进行热更新,把新模型紧急进行上线。
数据驱动的自动迭代闭环
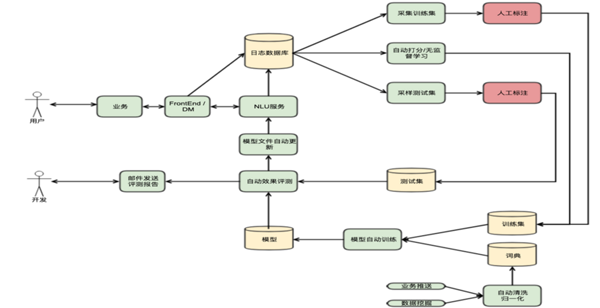
对于线上系统而言,构建如上图所示的自动迭代闭环,能更好地利用业务数据来提升服务质量。
NLU线上系统的核心设计
算法流程的抽象
为了适应线上系统串联、多变的算法流程,我们把线上系统的算法进行抽象,如下图所示:
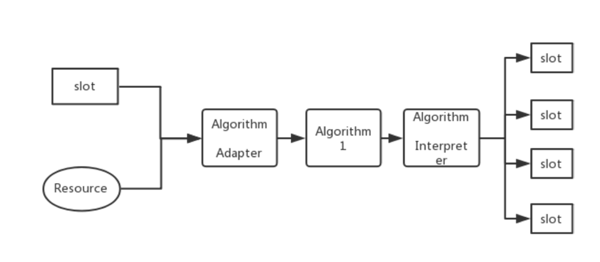
即每一个算法,都依赖于若干个槽位(Slot)和资源(Resource),一旦槽位和资源就位,就会触发对应的算法执行。算法的执行先通过算法适配器,来适配槽位和资源中的数据,转换成算子的输入格式。然后算子执行算法本身,执行完算子后,再经过算法解析器。算法解析器主要用于解析算法执行的结果,触发对应的槽位。如根据算法的结果,触发Top 3的结果。
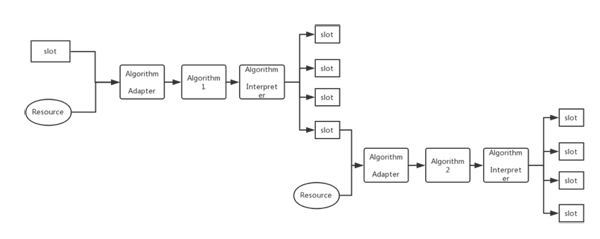
多个算法串联起来,就构建成如下结果:
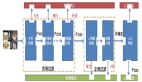
热更新流程的设计
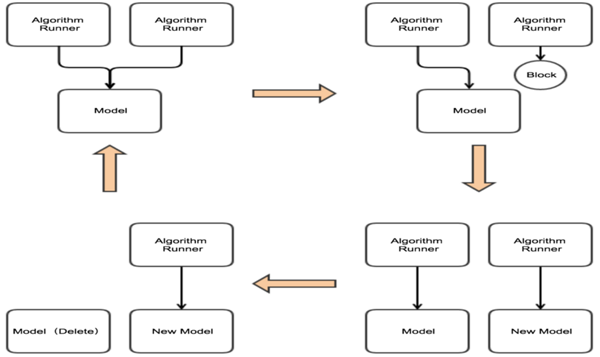
如上图所示,我们把算法的热更新流程设计如上。初试状态为左上角,即多个Query使用同一份模型数据。当遇到模型更新的请求后,系统将会block住新的query(右上角状态)。然后更新模型完后,新的query使用新的模型,旧query依然使用旧模型(右下角状态)。最后,当使用旧模型的query结束后,把旧的模型从内存中删除(左下角),然后系统恢复到初始状态。
声学模型训练系统
因为TensorFlow等通用深度学习训练平台,缺乏了特征提取等业务相关的领域功能,而Kaldi的声学模型训练过程又太慢。所以美团开发了一个声学模型训练系统——Mimir,其具备如下特性:
- 使用比TensorFlow更粗颗粒度的建模单元,使得任务调度、优化更简单方便易行。
- 使用数据并行的并行方案,单机多卡可达到近线性加速。(采取同步更新策略下,4卡加速比达到3.8)
- 移植了Kaldi的一些特有的训练算法。
- 速度上为Kaldi的6~7倍。(800个小时的训练数据,单机单卡的条件下,Kaldi需要6~7天, Mimir只需20个小时)
- 业务上,移植了Kaldi的特征提取等领域的相关模块。