












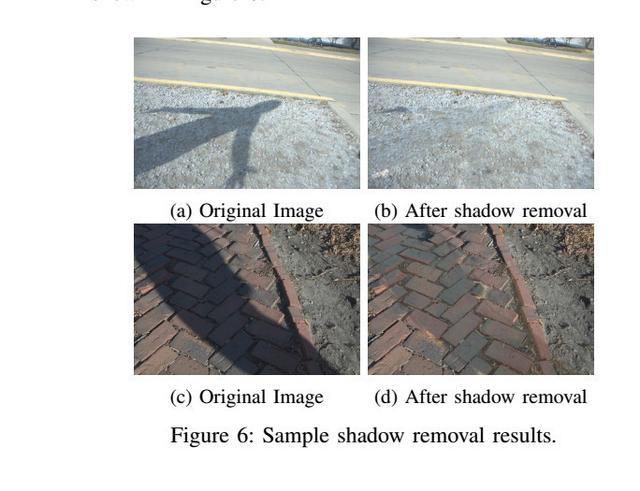
人工智能阴影检测与去除,实现一种基于反射的阴影检测与去除方法摘要:阴影是图像的常见方面,当未被发现时会影响场景理解和视觉处理。 我们提出了一种基于反射率的简单而有效的方法来检测单个图像的阴影。 首先对图像进行分割,并且基于反射率,照明和纹理特征,将片段对识别为阴影对和非阴影对。 所提出的方法在两个公开可用且广泛使用的数据集上进行测试。 尽管需要较少的参数,但与先前报道的方法相比,我们的方法在检测阴影方面实现更高 我们还通过重新点亮检测到的阴影区域中的像素来显示无阴影图像的结果。
人工智能阴影检测与去除,实现一种基于反射的阴影检测与去除方法简介:阴影无处不在。当光被物体部分或完全遮挡时形成它们。阴影提供有关图像中的光照方向[1],场景几何和场景理解[2]的信息,对于跟踪视频中的对象[3]至关重要。它们也是航拍图像的组成部分[4]。但是,阴影也会使对象检测,特征提取和场景解析等任务变得复杂[5]。
已经提出了许多方法来检测图像和视频中的阴影。在本文中,我们专注于检测彩色图像的阴影。随着最近数据驱动方法的蓬勃发展,基于机器学习的方法已应用于检测阴影。在[5]中,由2490个参数组成的条件随机场用于检测灰度图像中的阴影,使用强度,偏度,纹理,梯度相似性等特征。在[7]中,使用由1000个参数组成的卷积神经网络来检测阴影。在[6]中,边缘周围的强度信息用于检测阴影边界。在[8]中,首先对图像进行分割,并且通过将不同的片段彼此进行比较,使用各种分类器来检测颜色和纹理相似的区域。
人工智能阴影检测与去除,实现一种基于反射的阴影检测与去除方法贡献:在本文中,我们提出了一种基于非训练的阴影检测方法,该方法需要较少的参数与以前的方法相比,实现了高精度[8],[5],[7]。我们在用于比较区域的特征和分类器以及使用这些比较来获得阴影掩模的方法中与[8]不同。每个表面都有两个特征:反射率和纹理。当在表面上投射阴影时,其照度降低,但其反射率保持不变。由于照度的降低,纹理信息也会有一些损失。通过检查表面,很难判断是否由于阴影或阴影的影响而变暗。图1给出了一个例子。通过相互比较表面,我们可以更自信地检测阴影。因此,通过基于图像的反射率,纹理和照明特性配对图像的不同区域,我们可以有效地检测阴影。
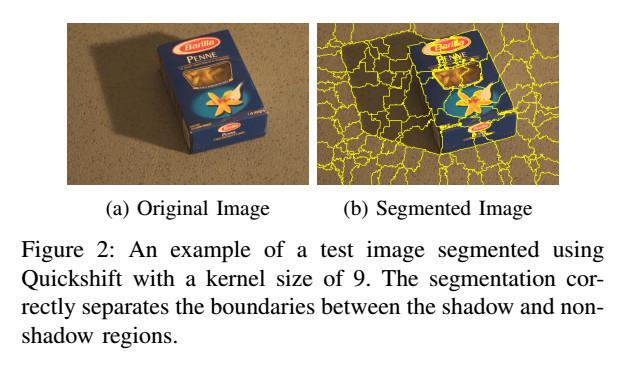
人工智能阴影检测与去除,实现一种基于反射的阴影检测与去除方法阴影检测:我们的目标是根据图像的反射率,纹理和照明特性对图像的不同区域进行分组。为了将具有相似属性的像素分组到不同的区域,我们首先使用高斯内核大小为9的Quickshift方法[11]对图像进行分割。我们的假设是单个分段应包含具有相似反射率和光照的像素。分割结果的一个例子如图2所示。在下面的小节中,我们将解释如何设计反射率,纹理和照明分类器,将每个分段标记为阴影或非阴影。
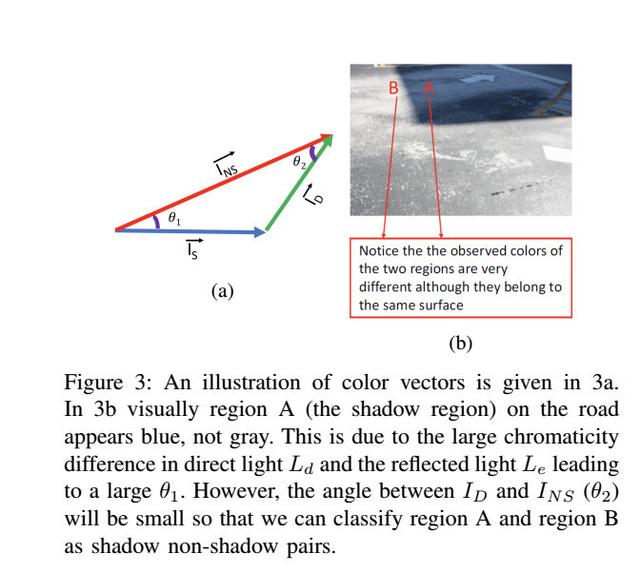
亮度分类器:当直射光被部分或完全遮挡时形成阴影,因此具有较低的照度。照度的降低取决于Ld和Le的相对强度。照明强度的大幅下降使阴影变暗。为了构建有效的亮度分类器,我们需要能够检测到照明的减少并且能够将该减少归因于光的阻碍而不是由于一些噪声。为了对此进行建模,我们将查看LAB颜色空间中所有像素的亮度值。我们计算LAB空间中所有段的中值亮度,并计算中值亮度值的直方图。直方图的峰值给出了图像中不同照明区域的数量的估计。
然后,我们通过基于它们与峰的接近度对分段进行分组,将图像分割成区域。不比较相同区域内的区段,因为它们具有相似的照明强度,而来自不同组的区段被允许用于比较以检测阴影。此步骤很有用,因为它可以自适应地将片段分组到具有相似照明的区域。图中显示了根据亮度将分段分组到区域的示例
除了分组标准之外,对于两个片段是阴影非阴影对,它们在LAB空间中的中值亮度T的比率必须高于1.2的阈值,以避免比较具有相似照明的片段。 T可以是1到1之间的任何值,并且越接近1,两个分段的照明强度越接近。与具有相似照明强度的片段相比,阴影非阴影对将具有高的T值。
纹理分类器:由于阴影和相应的非阴影段具有相同的材质,因此它们的纹理特征将是相似的。然而,由于阴影段的照明强度降低,一些纹理信息丢失。为了捕捉这种现象,我们在比较它们之间寻找纹理相似性,条件是它们的T不是很高,因为如果它的高很多纹理信息就会丢失。我们计算两个片段的纹理贴图[12]的直方图之间的地球移动距离,并对其进行阈值以找出两个片段是否具有相似的纹理。然而,如果T大于2.4,我们不会将它们与纹理相似性进行比较,因为由于照明的减少,许多纹理信息在阴影区段中丢失。
实现:在本小节中,我们将描述如何使用上述三个分类器来检测阴影非阴影段对。使用上面讨论的反射率,纹理和亮度分类器将每个片段与其相邻片段进行比较。如果所有分类器将该对标记为阴影非阴影对,则存储该连接。我们使用这些连接来连接更多段。对于每个阴影非阴影对,我们采用阴影片段的所有非分类邻居,并使用上述分类器将它们与非阴影片段进行比较。我们重复这个过程的邻居,它们也是影子片段。在第一次迭代中将不会检测到这样的段。为了将它们连接到已经标记的阴影段,我们使用从初始连接获得的信息重复该过程。该过程如图5所示。
人工智能阴影检测与去除,实现一种基于反射的阴影检测与去除方法结论:我们提出了一种简单而有效的阴影检测方法,只需很少的参 首先对每个图像进行分割,并且基于它们的反射率,照明和纹理特征将片段对识别为阴影非阴影对。 实验结果表明,我们的方法对于检测阴影是有效的,但在识别非阴影方面具有较低的准确性。 检测到的阴影对和非阴影对之间的连接用于成功删除测试图像中的阴影。






















