












“让无人驾驶摆脱方向盘?” 这句话看起来有点奇怪,无人驾驶和方向盘好像本就是一对矛盾的词组。然而事实上,目前无人驾驶还远远离不开方向盘。
国际汽车工程师协会(SAE)把自动驾驶分为了5个阶段,L0~L5 ,其中L0是指人工驾驶,L5则是完全自动驾驶。
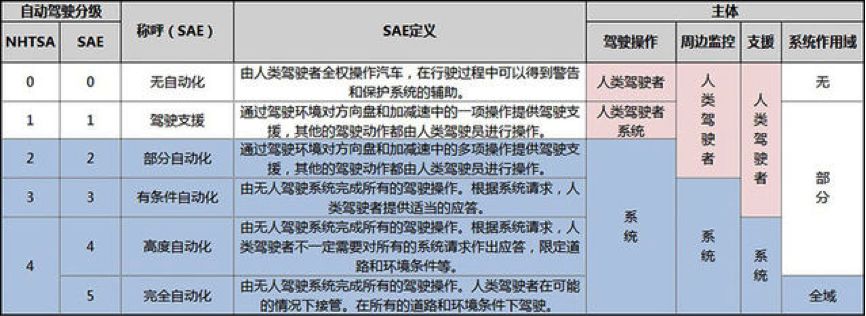
按照上述分级标准,当前大量传统车企均已实现了L1的驾驶支援,也就是辅助驾驶。部分车型的定速巡航、自动跟车等功能也已步入了L2阶段——由系统架构的自动驾驶领域,又称ADAS。
“ADAS与无人驾驶,好比灵长类与智人,看着挺像,其实不是一回事儿。” 驭势科技联合创始人赵勇解释道,“举个例子,ADAS前方碰撞预警误报(false positive)一下无伤大雅,但变成自动驾驶总是无端踩刹车,会烦死人,反之,如果为了减少误报而导致少报(false negative),ADAS不会有大问题,毕竟人是主要操控者,但自动驾驶是机器为主,对危险的错判将会引发大问题。”
与ADAS相比,无人驾驶的复杂程度和难度呈指数级增加。真正的无人驾驶之路才刚开始,挑战与机遇并存,许多互联网巨头和传统车企都在押宝这一领域。作为一家成立不到2年的创业公司,驭势科技则显得非常与众不同。
“我们必须建立一家新的公司,这个新公司首先要符合车规,除了拥有***的计算机视觉技术,还要有***的复杂系统设计、汽车规划和控制。”谈到创立驭势科技的初心,赵勇认为,中国需要真正高含金量的技术公司,不希望去挑战某种已经存在的不良现象,而是希望去开创一种全新的、更高级的生态。
抱着这一愿景,赵勇拉上吴甘沙(原Intel中国研究院院长)、姜岩(原北京理工大学无人车项目负责人)连同其他几个小伙伴一起创立了驭势科技。
尽管成立时间不长,几位联合创始人已经做好了最初的「两年计划」,在自动驾驶的前后分别加上了限定词,定下了两条路:
全天候的半自动增强驾驶,又被驭势称之为“人机共驾”。在这里,人依然是驾驶的主导方,机器则是协同方,两者之间进行协作驾驶,即驾驶时,机器会根据收集到的信息,在需要时提供转向、助力或者刹车的辅助,也可以在某些特殊场景下实现自动驾驶。
限定区域的无人驾驶。在这个场景下,“人”只是乘客,驾驶由机器一手操控,发生的环境会有所改变,可能是某个园区、公共交通的***一公里或者某个限定路线。之所以强调“限定”,代表周围环境已经为车辆熟知并掌控,并不会出现未知和不可控的情况,而且这个模式的车辆是低速状态。
要实现这一目标,吴甘沙认为目前还存在两大难点:
- 算法,现在的人工智能还缺乏足够的学习能力,在一个确定的场景中可能没有问题,但自动驾驶的真正场景是一个复杂、动态并且充满不确定性的。
- 系统,智能驾驶系统的复杂程度,仅就单代码量而言,奔驰S级轿车是波音787客机的16倍,这么一套复杂的系统如何支撑它良好运行就是一个问题。
算法需要大量时间和数据去验证,也需要大量GPU资源;系统需要不断地去完善代码,也需要不断尝试和大量资源。因此,为了解决这些问题,驭势科技选择与UCloud合作。
驭势科技现有的GPU都用来跑生产数据,大量GPU资源都在满负荷运转,但同时研究团队还需要ImageNet数据来做Pre-training,如果使用现有的GPU资源,那么就需要排队等待使用,这势必会减缓算法和系统的研发速度。
针对驭势科技的情况,UCloud推荐了UAI-Train产品。UAI-Train底层有海量P40资源,可以通过界面选择一次训练需要的资源量,上层把系统、驱动、框架都已经封装好,用户只需上传代码即可。
在使用时,不同于租用GPU主机空闲时也要收取费用,UAI-Train只有任务开始时才会产生费用,任务停止则计费停止,真正做到按需收费。训练效率上,利用UAI-Train底层资源的优秀性能,P40的GPU加上SSD磁盘的配置,使用户在享受低廉价格的同时,还可以有超过本地GPU服务器的性能。
UCloud 为驭势科技在算法和系统两个核心问题上提供了很好的助力,使其无人驾驶的商业化之路走得更好更快。在2017年拉斯维加斯CES(国际消费电子展)上,驭势科技发布了首辆无人驾驶电动车并进行了技术演示。
(图:驭势科技无人驾驶电动车)
按照驭势科技的时间轴,未来1年内会加速推进这款车的量产,初步实现园区内低速无人驾驶应用,覆盖主题公园、景区、度假村等场景,到2019年逐渐向中高速自动驾驶过渡。
“现在需要做的事情就是把它变成真的,未来五年计划,虽然不一定是说这个东西一定能成,但一定要走出一条让它能够可行的路子来。”赵勇坚定地说。
















