













SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,SLAM 的主要应用于机器人、无人机、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。
由于传感器种类和安装方式的不同,SLAM 的实现方式和难度会有一定的差异。按传感器来分,SLAM 主要分为激光 SLAM 和 VSLAM 两大类。其中,激光 SLAM 比 VSLAM 起步早,在理论、技术和产品落地上都相对成熟。基于视觉的 SLAM 方案目前主要有两种实现路径,一种是基于 RGBD 的深度摄像机,比如 Kinect;还有一种就是基于单目、双目或者鱼眼摄像头的。VSLAM 目前尚处于进一步研发和应用场景拓展、产品逐渐落地阶段。
激光 SLAM:早在 2005 年的时候,激光 SLAM 就已经被研究的比较透彻,框架也已初步确定。激光 SLAM,是目前最稳定、最主流的定位导航方法。

激光 SLAM 地图构建
VSLAM(基于视觉的定位与建图):随着计算机视觉的迅速发展,视觉 SLAM 因为信息量大,适用范围广等优点受到广泛关注。
(1)基于深度摄像机的 Vslam,跟激光 SLAM 类似,通过收集到的点云数据,能直接计算障碍物距离;
(2)基于单目、鱼眼相机的 VSLAM 方案,利用多帧图像来估计自身的位姿变化,再通过累计位姿变化来计算距离物体的距离,并进行定位与地图构建;

视觉 SLAM 地图构建,图片来源:百度 AI
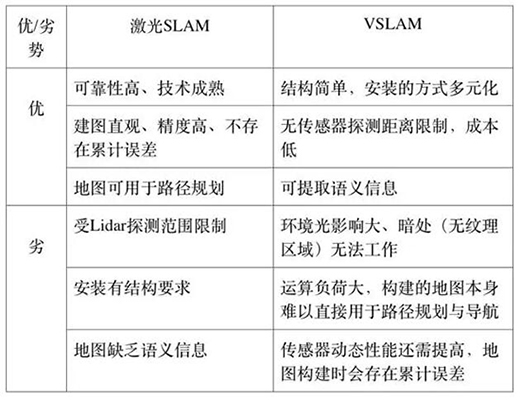
一直以来,不管是产业界还是学术界,对激光 SLAM 和 VSLAM 到底谁更胜一筹,谁是未来的主流趋势这一问题,都有自己的看法和见解。下面就简单从几个方面对比了一下激光 SLAM 和 VSLAM。
成本
不管是 Sick,北洋,还是 Velodyne,价格从几万到几十万不等,成本相对来说比较高,但目前国内也有低成本激光雷达(RPLIDAR)解决方案。VSLAM 主要是通过摄像头来采集数据信息,跟激光雷达一对比,摄像头的成本显然要低很多。但激光雷达能更高精度的测出障碍点的角度和距离,方便定位导航。
应用场景
从应用场景来说,VSLAM 的应用场景要丰富很多。VSLAM 在室内外环境下均能开展工作,但是对光的依赖程度高,在暗处或者一些无纹理区域是无法进行工作的。而激光 SLAM 目前主要被应用在室内,用来进行地图构建和导航工作。
地图精度
激光 SLAM 在构建地图的时候,精度较高,思岚科技的 RPLIDAR 系列构建的地图精度可达到 2cm 左右;VSLAM,比如常见的,大家也用的非常多的深度摄像机 Kinect,(测距范围在 3-12m 之间),地图构建精度约 3cm;所以激光 SLAM 构建的地图精度一般来说比 VSLAM 高,且能直接用于定位导航。
易用性
激光 SLAM 和基于深度相机的 VSLAM 均是通过直接获取环境中的点云数据,根据生成的点云数据,测算哪里有障碍物以及障碍物的距离。但是基于单目、双目、鱼眼摄像机的 VSLAM 方案,则不能直接获得环境中的点云,而是形成灰色或彩色图像,需要通过不断移动自身的位置,通过提取、匹配特征点,利用三角测距的方法测算出障碍物的距离。
安装方式
雷达最先开始应用于军事行业,后来逐渐民用。被大家广泛知晓最先应该是从谷歌的无人车上所知道的。当时 Velodyne 雷达体积、重量都较大,应用到一些实际场景中显然不适合。比如无人机、AR、VR 这种,本身体积就很小,再搭载大体积的激光雷达的话,根本无法使用,也影响美感和性能。所以 VSLAM 的出现,利用摄像头测距,弥补了激光雷达的这一缺点,安装方式可以随着场景的不同实现多元化。
其他
除了上面几点之外,在探测范围、运算强度、实时数据生成、地图累计误差等方面,激光 SLAM 和视觉 SLAM 也会存在一定的差距。
比如:

注:左为 Lidar SLAM,右为 VSLAM,数据来源:KITTI
可以明显看出,对于同一个场景,VSLAM 在后半程中出现了偏差,这是因为累积误差所引起的,所以 VSLAM 要进行回环检验。
激光 SLAM 是目前比较成熟的定位导航方案,视觉 SLAM 是未来研究的一个主流方向。所以,未来,多传感器的融合是一种必然的趋势。取长补短,优势结合,为市场打造出真正好用的、易用的 SLAM 方案。
【本文是51CTO专栏机构“机器之心”的原创文章,微信公众号“机器之心( id: almosthuman2014)”】

















