所谓的热点图,是图1)构建一张灰度图,图2)在每个热点的位置上绘制并叠加形成灰色的热点图,图3)根据颜色表生成热点图。不难看出,最核心的是图2的过程。
图1
图2&图3
1强调两处细节
这种思路效率高,缺点就是不够灵活,每个点都是同一个样式,没有考虑该点的半径和权重。创建大小不一的模版(章),每个热点根据自己的半径值选择对应的章就可以,实现思路如下:
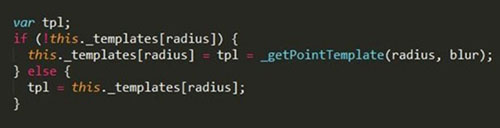
半径&模版
权重的不同,是通过盖章的“力度”,权重越大,不透明度越大,这样叠加时也越能体现权重大的效果。是否发现,这个方式会产生覆盖情况,并不严谨。
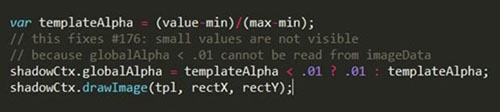
权重&透明度(力度)
2大数据渲染
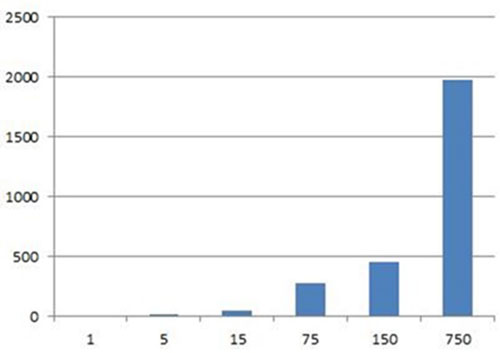
我们看看在不同数据量下的性能分析。7759个热点,每个点有经纬度和权重三个float值,生成一张2000*1400左右的热点图。采用pa7/heatmap.js,在Chrome下测试1w(1倍),5w(5倍),10w(15倍),60w(75倍),100w(150倍),600w(750)六个级别,***别会崩溃。
备注:只测试了一次,误差估计不小,仅供参考。
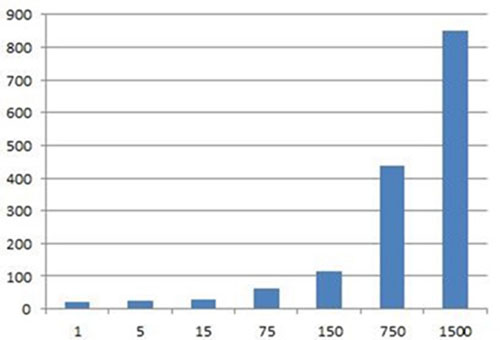
数据转换消耗(毫秒)
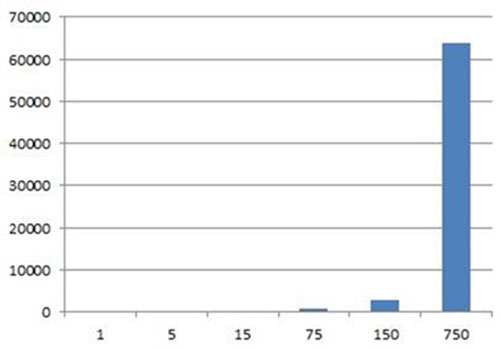
纯渲染时间(毫秒)
在这种方式下渲染时间依次为:68,100,194,894,2918,63817(ms)。数据量在100w以内的还好,渲染时间将近3s。但再往上就不给力了。***别下读取会崩溃,内存达到1.2G以上。渲染就算可用,从时间消耗上也不实用。
在渲染性能方面,之前我们通过模版,盖章的思路已经优化了,沿着这个思路提升空间不大。而且,因为渲染上存在叠加依赖,很难并行。
CPU并行
自己实现渲染算法,以并行的方式实现数值计算部分。思路如下:对热点图这个目标图片,遍历每一个像素,以像素半径做一个缓冲区分析,获取对应的热点数据(数据支持范围查询)。如果没有热点,则该像素为空;如果存在N个热点,则计算该点的热点值。乍看上去,这不是又倒退到逐点计算的思路上。
坦白说,我很不喜欢这个思路,就好比老师出了一道1+2+3……+100的题目,本来是想让你发现规律和数据模型,。可是你真的在一个个累加。但全班同学合作,把这100个数分解成10组,每人分别计算一部分,同样也能很快得出结果,这就是另一个角度的智慧。
因为每个点的计算是独立的,可以通过并行来优化“渲染”时间。但这种思路是以放弃渲染技术为代价的,也要借助于空间索引,并行计算,在JS上很难实现。
另外,这个思路让我认为(不知道对不对),点差值和热点图并无本质区别。
GPU并行
下图是OpenGL的思路:每一个热点构造成一个正方形,对角线将其分为两个三角形,有四个顶点和6个顶点索引。采用批次渲染的方式,每个批次下渲染1w个热点(对应4w个顶点),将数据分解为多个批次,实现大数据的渲染,GPU中实现混合效果。具体的shader代码可以参考pyalot。
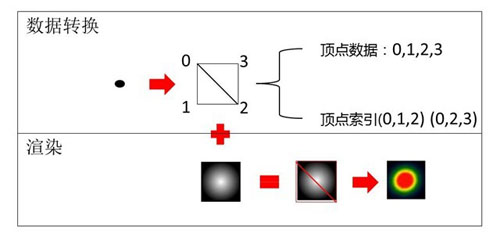
我在WebGL下实现了这个思路,还是刚才那个7759个热点的数据,我放到一个渲染批次,对这一个批次渲染多次, 1s内完成***别的渲染。
3问题
数据解析是瓶颈,比如经纬度点最终要转换到像素单。如果性能还不够,就“偷工减料”,建立矢量金字塔,本质就是把N个点合并成一个,减少渲染过程的计算量。
二维对应的策略是,渲染性能不够,就把渲染问题转为for循环下的简单计算,然后通过CPU并行优化;对于三维,需要点转三角形,创建buffer,然后通过GPU实现渲染过程。
从渲染的角度来看,无论二维还是三维,在十万级别下的性能都不错,***别也能接受,差别不大,但十万以上,两者的渲染差距则体现出来,前者像打狗棒,强调的是心法和招式,后者则是降龙十八掌,靠的是内力。两点区别,二维是因为渲染性能不行,只好采用最简单的数值计算,以这样的代价实现核心计算的并行;三维本身就是并行策略,就是通过shader,通过顶点和片元实现GPU的并行。第二,GPU的并行能力显然不是CPU可以媲美的,换句话说,GPU能够承担更多的并发计算量,尽可能少的对原始数据做预处理,理论上,只要内存够用或读取数据合理,显存上通过批次渲染,可以渲染任意大的数据量,而且时间和批次应该是线性的。
***,再强调一下数据。简单计算了一下,假如是一个二进制流的方式,一个热点占12个字节,这样1kw个点要占120M,即使压缩后也得20M,这还没有考虑数据转换上的消耗。对于Web端,基于原始数据,需要有一种机制,能够快速的完成数据传输和处理。
有一个不一定对的思路,建一个GeoHash,大范围的预先生成热点图,更新频率可以不高;局部范围则通过GeoHash获取对应的热点,实现本地渲染。GeoHsh貌似是一种很不错的大数据设计方式,我也不太了解,有时间再研究研究。
还有一个收获,当复杂度达到一定程度,原先行得通的算法和方案不一定满足要求了。更精彩的是,因为性能低,以前认为比较差的思路,因为思路简单,容易实现并行改造,竟然可行了。