开放源代码软件让 Google 能够无需重新发明轮子就能够快速有效地进行开发,也让我们能够集中注意力来解决新问题。我们知道,支持开源,就是站在了巨人的肩膀上,所以 Google 员工能够轻松地将他们在内部工作的项目作为开放源代码发布。
我们已经发布了超过2000万行的开源代码,包括 Android,Angular,Chromium,Kubernetes 和 TensorFlow 等项目。 我们的版本还包括许多您可能不熟悉的项目,例如 Cartographer,Omnitone 和 Yeoman。
回顾我们在 2016 年开源的项目,有很多令人兴奋的事情。 我们发布了很多开源软件、硬件和数据集,来看看今年的一些版本。
负载均衡系统 Seesaw
Seesaw是由我们网络可靠性工程师用 Go 语言开发的基于 Linux 虚拟服务器的负载平衡平台,就像所有好的项目一样,这个项目也是为了解决实际问题而产生的。
Seesaw发布的博客中这样写道:“我们需要能够处理单播(unicast)和任播(anycast)虚拟 IP (VIPs) 流量,使用 NAT 和 DSR (也被称为 DR) 执行负载均衡,执行针对后端的健康检查。特别是,我们需要一个容易管理的平台,可以自动部署配置的变化。在评估了一些包括现有的开源项目的平台之后,我们没能找出一个能够满足我们所有需求的平台,所以我们决定自己着手开发一个可靠和可伸缩的负载均衡平台。“
它让我们提高了服务可用性并降低了管理开销。我们很高兴能够把它分享出来,希望其他企业也能够从中受益。
供应商安全评估调查问卷 VSAQ
VSAQ (Vendor Security Assessment Questionnaire,供应商安全评估调查问卷)是一种能够自适应式评估多种供应商安全和隐私防护策略的评估调查问卷。
我们每年对数百家供应商的安全性进行评估,因此开发了 VSAQ 来自动化大部分初始信息的收集。许多供应商发现我们的问卷直观灵活,所以我们决定分享出来。 VSAQ 框架包括四个可扩展的问卷模板,涵盖Web应用程序,隐私程序,基础设施以及物理和数据中心安全。

Nest开源的Thread协议 OpenThread
Nest 开源的 OpenThread 是基于其 Thread 协议实现的,通过 6LoWPAN 标准连接的智能家居网络。OpenThread 的开发由 ARM,微软,高通,德州仪器和其他主要供应商支持。
OpenThread 是 Nest 主要负责的,而不是 Thread Group。通过 OpenThread,Nest 希望将Nest 产品中所用的技术在更多供应商和制造商中广泛采用,以加速智能产品家居网络产品的开发进展。随着越来越多的供应商运用 Thread,制造商可以有机会选择一个成熟的网络技术,而不需要创建它们自己的产品,消费者将会有越来越多安全可靠的相关产品可以选择。
创作艺术和谱写曲子的机器智能 Magenta
我们可以使用机器学习创造引人注目的艺术和音乐吗?Magenta 可以帮你实现,它是 Google Brain 团队建立的一个基于 TensorFlow 的项目,目的是提高音乐和艺术生成的机器智能的艺术水平,并建立一个艺术家,程序员和机器学习研究者的协作社区。
点这里听听谷歌人工智能的第一首歌曲
普通耳机实现 VR 中的 3D 全景音效 Omnitone
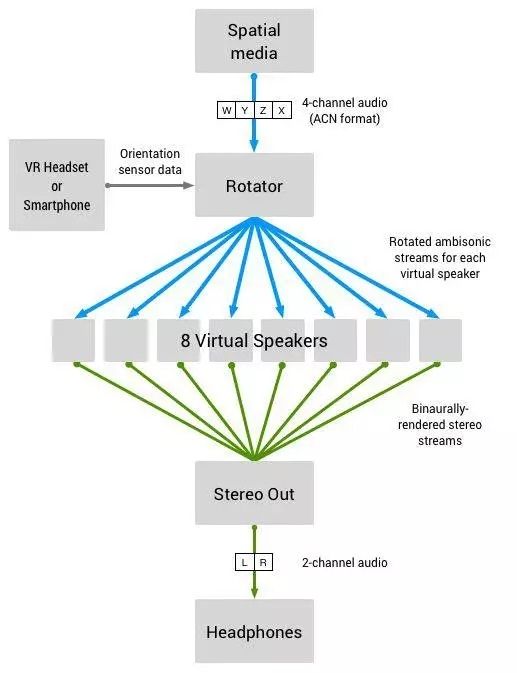
虚拟现实(VR)并不像没有空间音频一样沉浸,而且许多VR开发都是在专有平台上进行的。 Omnitone 是一个开放的图书馆,由 Chrome 小组成员为浏览器带来空间音频。Omnitone 基于标准的 Web Audio API,提供身临其境的体验,可以与 WebVR 等项目一起使用。
原理图:
实验记录应用 Science Journal
今天的智能手机有很多传感器,可以告诉我们周围的很多有趣的事情。通过这款应用,你可以利用你手机中的各种传感器来测量您的环境,如光和声音,因此您可以绘制您的数据,记录您的实验,并组织您的问题和想法。让手机成为一个强大的研究实验室。
我们推出了 Science Journal 是为了帮助教育工作者、学生和公民科学家利用这些传感器。
ROS 系统支持的 SLAM 库 Cartographer
Cartographer 是一个利用ROS系统支持的 2D 和 3D SLAM(simultaneous localization and mapping)库。 这个库库组合来自各种传感器的数据来计算定位和地图环境。
SLAM 是众多自动驾驶平台的重要组件,比如自动驾驶汽车、仓库中的自动叉车、扫地机器人、UAVs 等。在产业界和学术界常见的传感器配置上,Cartographer 能实时建立全局一致的地图。
文章部分内容编译自:https://opensource.com
原文作者:Google 开源推广团队成员 Josh Simmons