2.10 IPC.waitForResponse
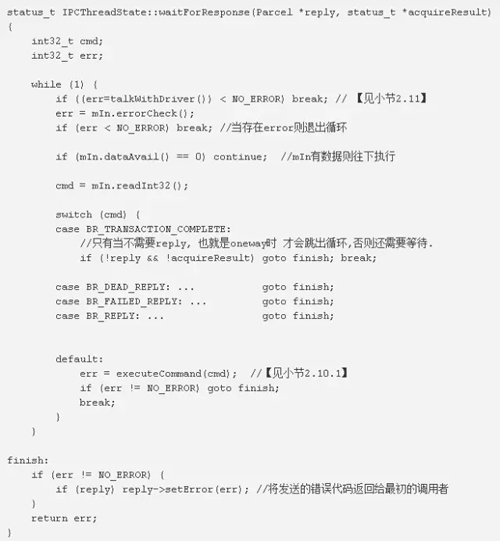
在这个过程中, 常见的几个BR_命令:
- BR_TRANSACTION_COMPLETE: binder驱动收到BC_TRANSACTION事件后的应答消息; 对于oneway transaction,当收到该消息,则完成了本次Binder通信;
- BR_DEAD_REPLY: 回复失败,往往是线程或节点为空. 则结束本次通信Binder;
- BR_FAILED_REPLY:回复失败,往往是transaction出错导致. 则结束本次通信Binder;
- BR_REPLY: Binder驱动向Client端发送回应消息; 对于非oneway transaction时,当收到该消息,则完整地完成本次Binder通信;
规律: BC_TRANSACTION + BC_REPLY = BR_TRANSACTION_COMPLETE + BR_DEAD_REPLY + BR_FAILED_REPLY
2.10.1 IPC.executeCommand
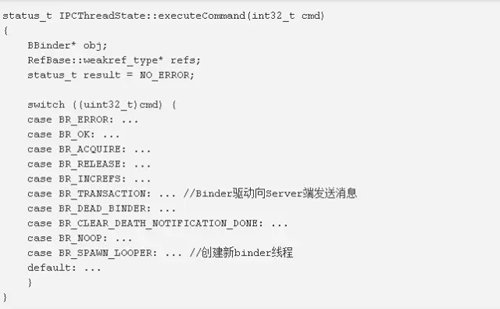
处于剩余的BR_命令.
2.11 IPC.talkWithDriver
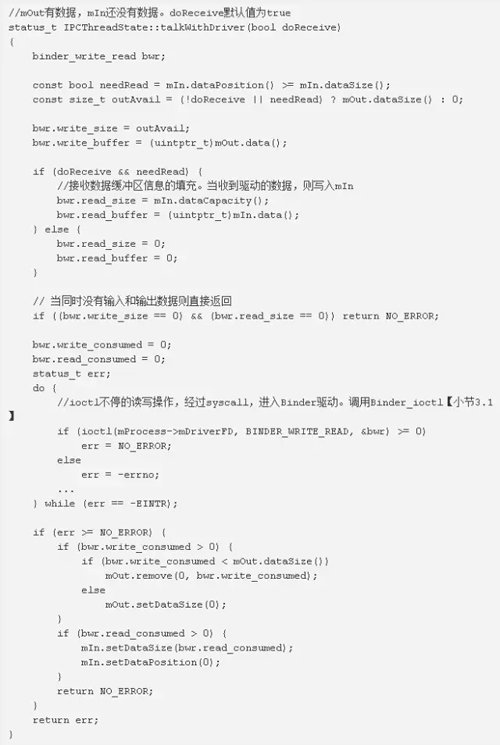
binder_write_read结构体用来与Binder设备交换数据的结构, 通过ioctl与mDriverFD通信,是真正与Binder驱动进行数据读写交互的过程。 ioctl()方法经过syscall最终调用到Binder_ioctl()方法.
三、Binder driver
3.1 binder_ioctl
[→ Binder.c]
由【小节2.11】传递过出来的参数 cmd=BINDER_WRITE_READ
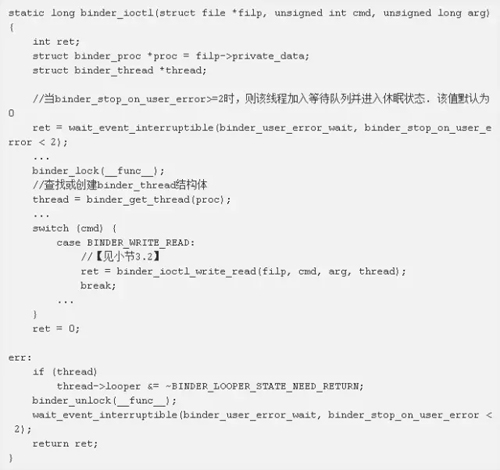
首先,根据传递过来的文件句柄指针获取相应的binder_proc结构体, 再从中查找binder_thread,如果当前线程已经加入到proc的线程队列则直接返回,如果不存在则创建binder_thread,并将当前线程添加到当前的proc.
- 当返回值为-ENOMEM,则意味着内存不足,往往会出现创建binder_thread对象失败;
- 当返回值为-EINVAL,则意味着CMD命令参数无效;
3.2 binder_ioctl_write_read
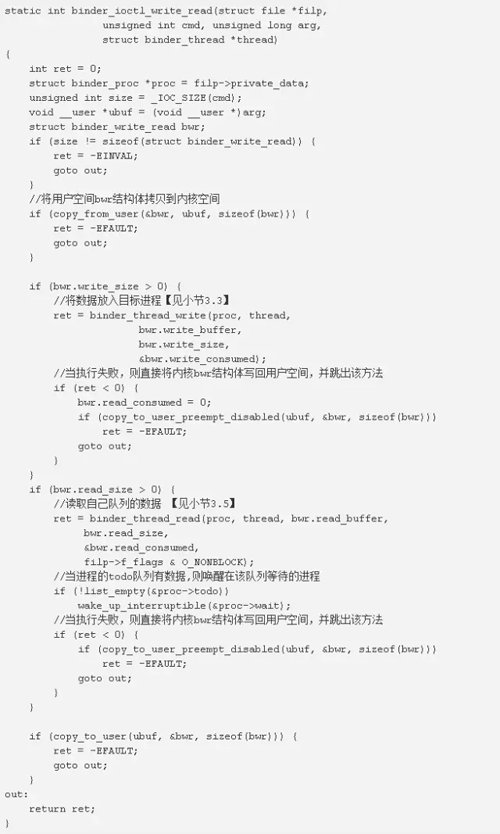
此时arg是一个binder_write_read结构体,mOut数据保存在write_buffer,所以write_size>0,但此时read_size=0。首先,将用户空间bwr结构体拷贝到内核空间,然后执行binder_thread_write()操作.
3.3 binder_thread_write
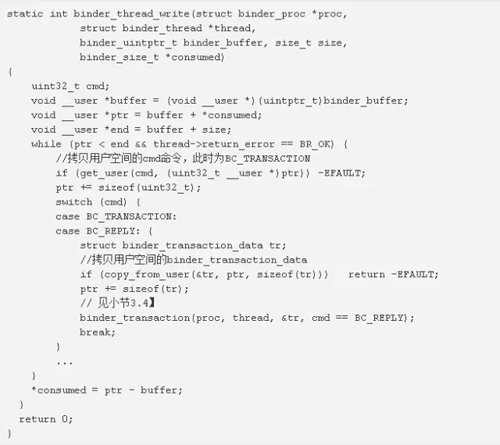
不断从binder_buffer所指向的地址获取cmd, 当只有BC_TRANSACTION或者BC_REPLY时, 则调用binder_transaction()来处理事务.
3.4 binder_transaction
发送的是BC_TRANSACTION时,此时reply=0。
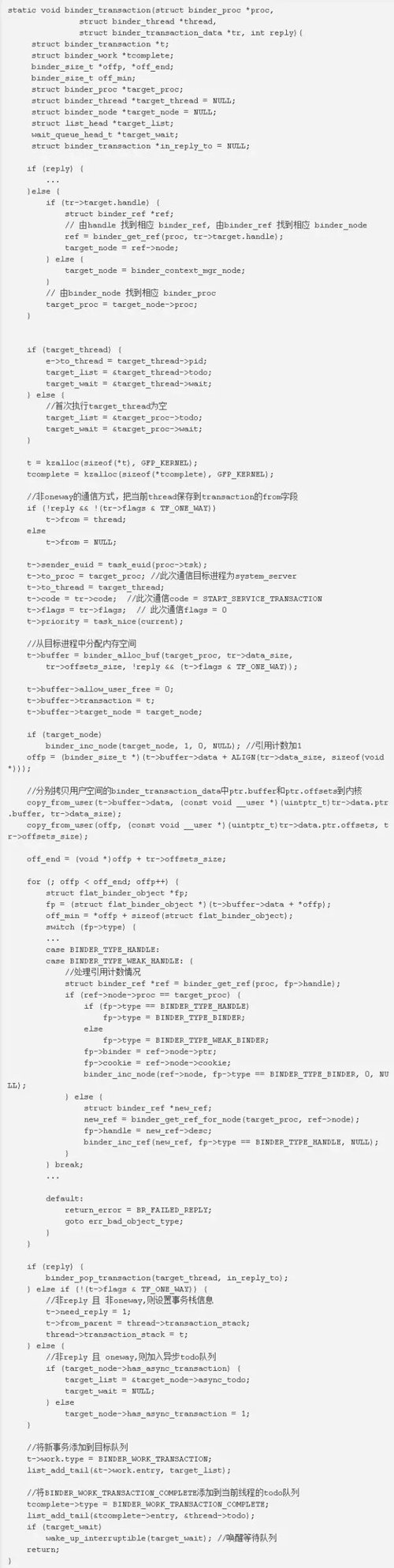
主要功能:
查询目标进程的过程: handle → binder_ref → binder_node → binder_proc
将BINDER_WORK_TRANSACTION添加到目标队列target_list, ***发起事务则目标队列为target_proc->todo, reply事务时则为target_thread->todo; oneway的非reply事务,则为target_node->async_todo.
将BINDER_WORK_TRANSACTION_COMPLETE添加到当前线程的todo队列此时当前线程的todo队列已经有事务, 接下来便会进入binder_thread_read()来处理相关的事务.
3.5 binder_thread_read
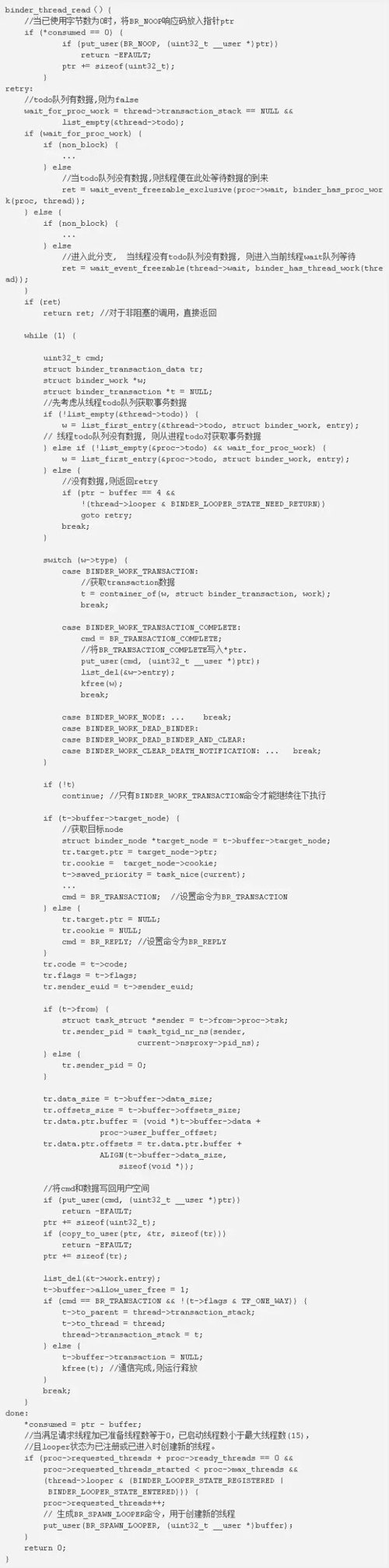
- 当收到的是BINDER_WORK_TRANSACTION_COMPLETE, 则将命令BR_TRANSACTION_COMPLETE写回用户空间.
- 当收到的是BINDER_WORK_TRANSACTION命令, 则将命令BR_TRANSACTION或BR_TRANSACTION写回用户空间.
四. 回到用户空间
4.1 何去何从
- 执行完binder_thread_write方法后, 通过binder_transaction()首先写入BINDER_WORK_TRANSACTION_COMPLETE写入当前线程.
- 这时bwr.read_size > 0, 回到binder_ioctl_write_read方法, 便开始执行binder_thread_read();
- 在binder_thread_read()方法, 将获取cmd=BR_TRANSACTION_COMPLETE, 再将cmd和数据写回用户空间;
- 一次Binder_ioctl完成,接着回调用户空间方法talkWithDriver(),并且刚才的数据写入mIn.
- 这时mIn有可读数据, 回到waitForResponse()方法,完成BR_TRANSACTION_COMPLETE过程.
- 再回退到transact()方法, 对于oneway的操作, 这次Binder通信便完成, 否则还是要等待Binder服务端的返回.
对于startService过程, 显然没有指定oneway的方式,那么发起者进程还会继续停留在waitForResponse()方法,等待收到BR_REPLY消息. 由于在前面binder_transaction过程中,除了向自己所在线程写入了BINDER_WORK_TRANSACTION_COMPLETE, 还向目标进程(此处为system_server)写入了BINDER_WORK_TRANSACTION命令. 而此时system_server进程的binder线程一旦空闲便是停留在binder_thread_read()方法来处理进程/线程新的事务, 收到的是BINDER_WORK_TRANSACTION命令, 经过binder_thread_read()后生成命令BR_TRANSACTION.同样的流程.
接下来,从system_server的binder线程一直的执行流: IPC.joinThreadPool –> IPC.getAndExecuteCommand() → IPC.talkWithDriver() ,但talkWithDriver收到事务之后, 便进入IPC.executeCommand(), 接下来,从executeCommand说起.
4.2 IPC.executeCommand
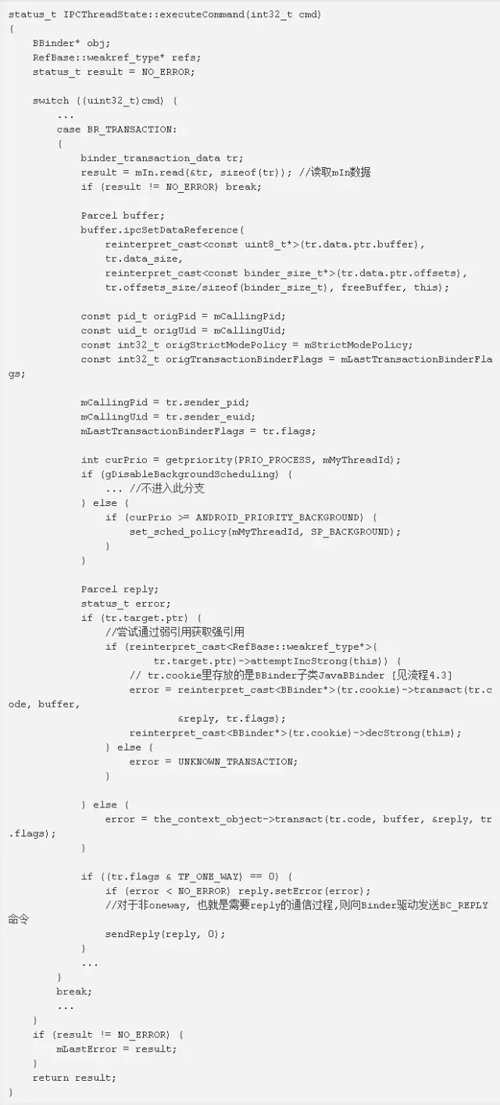
- 对于oneway的场景, 则到此全部结束.
- 对于非oneway, 也就是需要reply的通信过程,则向Binder驱动发送BC_REPLY命令
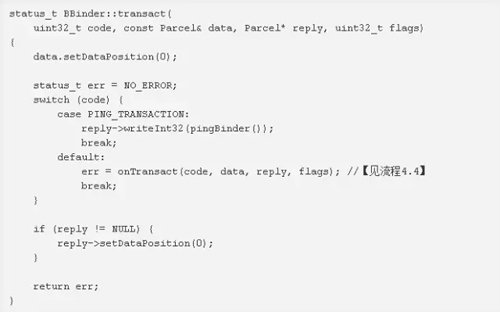
4.3 BBinder.transact
[→ Binder.cpp ::BBinder ]
4.4 JavaBBinder.onTransact
[→ android_util_Binder.cpp]
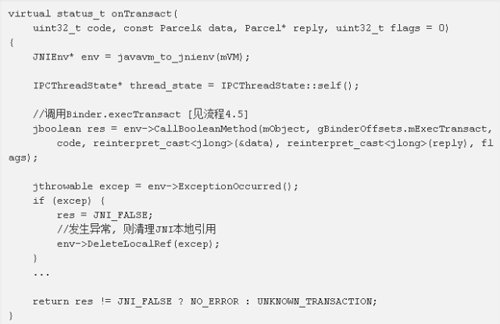
还记得AndroidRuntime::startReg过程吗, 其中有一个过程便是register_android_os_Binder(),该过程会把gBinderOffsets.mExecTransact便是Binder.java中的execTransact()方法.详见见Binder系列7—framework层分析文章中的第二节初始化的过程.
另外,此处mObject是在服务注册addService过程,会调用writeStrongBinder方法, 将Binder对象传入了JavaBBinder构造函数的参数, 最终赋值给mObject. 在本次通信过程中Object为ActivityManagerNative对象.
此处斗转星移, 从C++代码回到了Java代码. 进入AMN.execTransact, 由于AMN继续于Binder对象, 接下来进入Binder.execTransact
4.5 Binder.execTransact
[Binder.java]
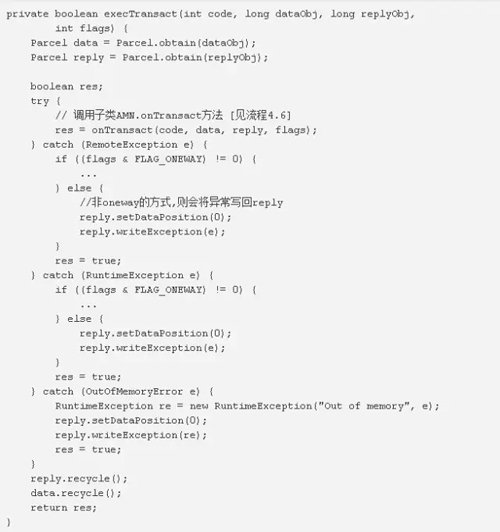
当发生RemoteException, RuntimeException, OutOfMemoryError, 对于非oneway的情况下都会把异常传递给调用者.
4.6 AMN.onTransact
[→ ActivityManagerNative.java]
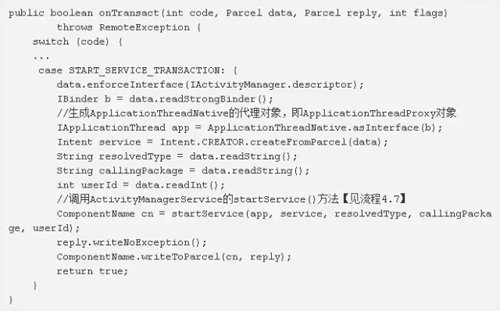
4.7 AMS.startService
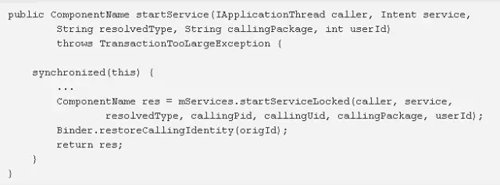
历经千山万水, 总算是进入了AMS.startService. 当system_server收到BR_TRANSACTION的过程后, 再经历一个类似的过程,将事件告知app所在进程service启动完成.过程基本一致,此处就不再展开.
五. 总结
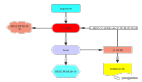
本文详细地介绍如何从AMP.startService是如何通过Binder一步步调用进入到system_server进程的AMS.startService. 整个过程涉及Java framework, native, kernel driver各个层面知识. 仅仅一个Binder IPC调用, 就花费了如此大篇幅来讲解, 可见系统之庞大. 整个过程的调用流程:
5.1 通信流程
从通信流程角度来看整个过程:
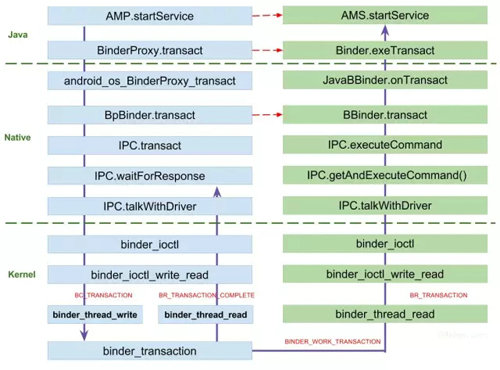
前面第二至第四段落,主要讲解过程 BC_TRANSACTION –> BR_TRANSACTION_COMPLETE –> BR_TRANSACTION.有兴趣的同学可以再看看后面3个事务的处理:BC_REPLY –> BR_TRANSACTION_COMPLETE –> BR_REPLY,这两个流程基本是一致的.
5.2 通信协议
从通信协议的角度来看这个过程:
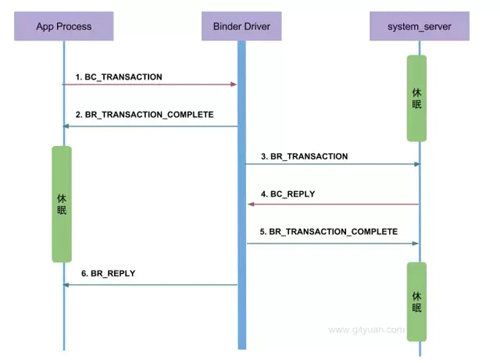
- Binder客户端或者服务端向Binder Driver发送的命令都是以BC开头,例如本文的BC_TRANSACTION和BC_REPLY, 所有Binder Driver向Binder客户端或者服务端发送的命令则都是以BR开头, 例如本文中的BR_TRANSACTION和BR_REPLY.
- 只有当BC_TRANSACTION或者BC_REPLY时, 才调用binder_transaction()来处理事务. 并且都会回应调用者一个BINDER_WORK_TRANSACTION_COMPLETE事务, 经过binder_thread_read()会转变成BR_TRANSACTION_COMPLETE.
- startService过程便是一个非oneway的过程, 那么oneway的通信过程如下所述.
5.3 说一说oneway
上图是非oneway通信过程的协议图, 下图则是对于oneway场景下的通信协议图:
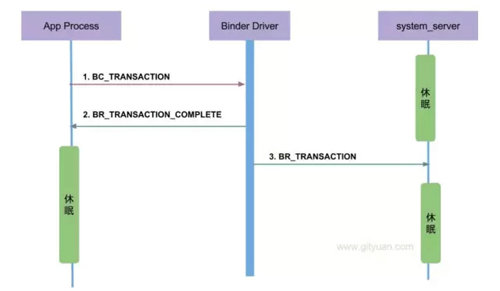
当收到BR_TRANSACTION_COMPLETE则程序返回,有人可能觉得好奇,为何oneway怎么还要等待回应消息? 我举个例子,你就明白了.
你(app进程)要给远方的家人(system_server进程)邮寄一封信(transaction), 你需要通过邮寄员(Binder Driver)来完成.整个过程如下:
- 你把信交给邮寄员(BC_TRANSACTION);
- 邮寄员收到信后, 填一张单子给你作为一份回执(BR_TRANSACTION_COMPLETE). 这样你才放心知道邮递员已确定接收信, 否则就这样走了,信到底有没有交到邮递员手里都不知道,这样的通信实在太让人不省心, 长时间收不到远方家人的回信, 无法得知是在路的中途信件丢失呢,还是压根就没有交到邮递员的手里. 所以说oneway也得知道信是投递状态是否成功.
- 邮递员利用交通工具(Binder Driver),将信交给了你的家人(BR_TRANSACTION);当你收到回执(BR_TRANSACTION_COMPLETE)时心里也不期待家人回信, 那么这便是一次oneway的通信过程.
如果你希望家人回信, 那便是非oneway的过程,在上述步骤2后并不是直接返回,而是继续等待着收到家人的回信, 经历前3个步骤之后继续执行:
- 家人收到信后, 立马写了个回信交给邮递员BC_REPLY;
- 同样,邮递员要写一个回执(BR_TRANSACTION_COMPLETE)给你家人;
- 邮递员再次利用交通工具(Binder Driver), 将回信成功交到你的手上(BR_REPLY)这便是一次完成的非oneway通信过程.
oneway与非oneway: 都是需要等待Binder Driver的回应消息BR_TRANSACTION_COMPLETE. 主要区别在于oneway的通信收到BR_TRANSACTION_COMPLETE则返回,而不会再等待BR_REPLY消息的到来.
【本文是51CTO专栏“小米开放平台”原创文章,“小米开放平台”微信公众号xiaomideveloper】